Réseau de fentes : mesures de longeurs d'onde.
1. Introduction
L'objectif est d'utiliser un réseau de fentes pour faire des mesures de longueurs d'onde.
Matériel
- Goniomètre
- Réseau 300 traits/mm.
- Lampe Hg.
- Miroir plan.
- Bloc de verre à faces parallèles.
2. Rappels théoriques
Le réseau est constitué de traits équidistants. Si n est le nombre de traits par millimètres, la période du réseau est a=1/n (en millimètres). Il est éclairé par la lumière sortant d'un collimateur. Les interférences sont observées à l'infini au moyen d'une lunette.
Figure pleine page{kind=link}
On note i l'angle des rayons incidents par rapport à la normale au réseau. L'angle de diffraction par rapport à la normale pour l'interférence constructive d'ordre p est noté αp. L'angle de cette interférence constructive par rapport à l'ordre 0 est noté βp. L'angle βp est aussi l'angle de déviation.
Figure pleine page{kind=link}
[1]
![]() Faire un schéma avec le tracé des rayons permettant de calculer la différence de marche pour deux fentes espacées de a.
Faire un schéma avec le tracé des rayons permettant de calculer la différence de marche pour deux fentes espacées de a.
[2]
![]() Déterminer l'expression de la différence de marche δ en fonction de i, a et l'angle α des rayons
diffractés.
Déterminer l'expression de la différence de marche δ en fonction de i, a et l'angle α des rayons
diffractés.
[3]
![]() En déduire la relation entre i, αp, a, l'ordre d'interférence p et la longueur d'onde λ.
En déduire la relation entre i, αp, a, l'ordre d'interférence p et la longueur d'onde λ.
[4]
![]() Exprimer l'angle de déviation βp en fonction de αp et de i.
Exprimer l'angle de déviation βp en fonction de αp et de i.
[5]
![]() Soit Δp l'angle entre la raie d'ordre p et la raie d'ordre -p. Dans le cas de l'incidence normale (i=0), montrer que :
Soit Δp l'angle entre la raie d'ordre p et la raie d'ordre -p. Dans le cas de l'incidence normale (i=0), montrer que :
[6]
![]() En déduire une méthode de mesure de λ (méthode 1).
En déduire une méthode de mesure de λ (méthode 1).
[7]
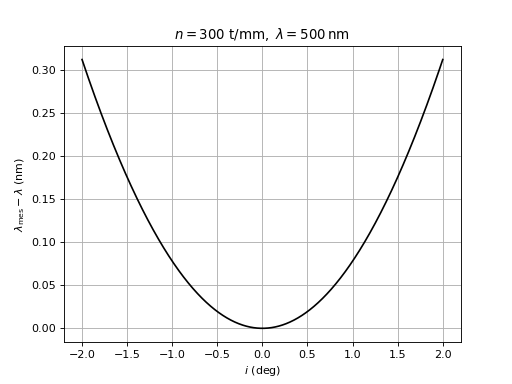
![]() La courbe suivante montre l'écart entre la longueur d'onde mesurée par la méthode 1 et la longueur d'onde réelle en fonction de l'angle d'incidence (courbe simulée pour un réseau de 300 traits par mm, voir annexe).
Commenter cette courbe. Pour un angle d'incidence de 1 degré, calculer la valeur de Δ1/2. Quel est l'intérêt de mesurer Δp et non pas simplement βp ?
La courbe suivante montre l'écart entre la longueur d'onde mesurée par la méthode 1 et la longueur d'onde réelle en fonction de l'angle d'incidence (courbe simulée pour un réseau de 300 traits par mm, voir annexe).
Commenter cette courbe. Pour un angle d'incidence de 1 degré, calculer la valeur de Δ1/2. Quel est l'intérêt de mesurer Δp et non pas simplement βp ?
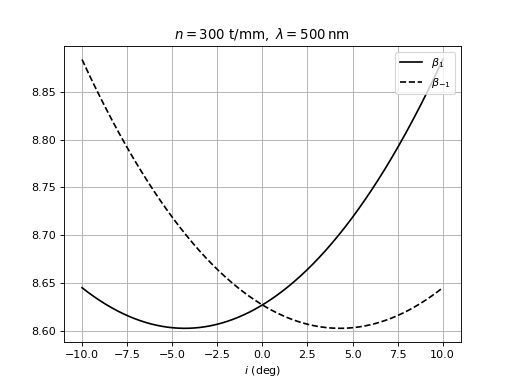
La courbe suivante montre les angles de déviation β1 et β-1 en fonction de l'angle d'incidence. Elle met en évidence l'existence d'un angle d'incidence qui réalise un minimum de la déviation.
[8]
![]() Montrer que pour l'angle d'incidence qui minimise la déviation βp, on a αp=-i. En déduire que pour ce minimum on a :
Montrer que pour l'angle d'incidence qui minimise la déviation βp, on a αp=-i. En déduire que pour ce minimum on a :
La méthode de mesure de λ par le minimum de déviation (méthode 2) consiste à faire tourner le réseau jusqu'à obtenir le minimum de déviation pour la raie étudiée et à mesurer la déviation correspondante βp. La relation permet de calculer λ.
3. Mesures de longueurs d'onde
3.a. Réglage du goniomètre
[9] Régler la lunette pour une vision à l'infini, par la méthode d'autocollimation.
[10] Mettre en place la lampe Hg. Régler le collimateur pour que l'image de la fente se forme à l'infini.
Le réglage de l'inclinaison du plateau se fait avec trois molettes situées sur son bord. Le plateau doit être perpendiculaire à l'axe de rotation du goniomètre. Un premier réglage approximatif de l'inclinaison du plateau se fait au moyen d'un niveau à bulle car l'axe de rotation est en principe vertical.
Pour effectuer un réglage plus précis, on utilise un bloc de verre parallélépipédique, dont les faces sont deux à deux parfaitement parallèles. On vise avec la lunette alternativement les grandes faces F1 et F2, qui sont polies et donc réfléchissent la lumière. Lorsque l'axe de la lunette est à peu près perpendiculaire à la face visée, on voit le réticule en croix et son image par réflexion sur la face, mais il y a a priori un décalage vertical d entre les deux fils horizontaux.
Figure pleine page{kind=link}
Lorsque les images des fils horizontaux coïncident, l'axe de la lunette est parfaitement perpendiculaire à la face visée.
L'objectif du réglage est d'obtenir la perpendicularité du plateau avec l'axe de rotation du goniomètre et la perpendicularité de l'axe de la lunette avec l'axe de rotation. On doit donc parvenir à la situation représentée sur la figure ci-dessous, où les deux images des deux fils horizontaux coïncident :
Figure pleine page{kind=link}
Si le plateau n'est pas perpendiculaire à l'axe de rotation, il est impossible d'obtenir cette coïncidence pour les deux faces, comme le montre la figure suivante :
Figure pleine page{kind=link}
Le réglage se fait en suivant la procédure suivante. On commence par viser la face F1 en tournant la lunette pour que le faisceau de lumière du rétro-éclairage et réfléchi par cette face soit visible. On observe alors un décalage vertical d entre l'image directe du réticule et l'image par réflexion sur la face. Ce décalage doit être compensé pour moitié avec la vis V1 du plateau, pour moitié avec la vis de réglage vertical de la lunette (située sous l'oculaire). Cette compensation étant réalisée, on tourne la lunette de manière à viser la face F2, sur laquelle on effectue le même réglage. On recommence le réglage sur la face F1, puis sur la face F2 et ainsi de suite jusqu'à ne plus observer de décalage vertical sur les deux faces.
3.b. Méthode 1 : incidence normale
Cette méthode consiste à éclairer le réseau en incidence normale, à mesurer l'angle Δp et à appliquer la relation .
[11] Tourner le plateau afin que la lumière arrive en incidence normale (à peu près) sur le réseau. Le réglage peut être affiné en remarquant que lorsque l'incidence normale est réalisée, les déviations βp et β-p sont opposées. Si ce n'est pas le cas, on doit tourner légèrement le réseau dans la direction de l'angle de déviation le plus grand en valeur absolue.
[12]
![]() Procéder aux mesures à l'ordre 1 et à l'ordre 2. Faire un tableau comportant le nom de couleur de la raie, l'angle Δ1 avec son incertitude, l'angle Δ2
avec son incertitude, et les longueurs d'onde calculées avec la relation avec leur incertitude. La méthode de calcul des incertitudes
par simulation de Monte-Carlo est rappelée en annexe.
Procéder aux mesures à l'ordre 1 et à l'ordre 2. Faire un tableau comportant le nom de couleur de la raie, l'angle Δ1 avec son incertitude, l'angle Δ2
avec son incertitude, et les longueurs d'onde calculées avec la relation avec leur incertitude. La méthode de calcul des incertitudes
par simulation de Monte-Carlo est rappelée en annexe.
3.c. Méthode 2 : minimum de déviation
Cette méthode consiste à rechercher le minimum de déviation pour la raie étudiée en faisant tourner le plateau, à mesurer la déviation pour ce minimum et à appliquer la relation .
[13]
![]() Pour la raie verte observée à l'ordre 1, tourner le plateau de manière à obtenir le minimum de déviation. Relever l'angle de déviation β1. En déduire λ.
Pour le calcul d'incertitude, il faut tenir compte de l'incertitude de la détermination du minimum de déviation.
Pour la raie verte observée à l'ordre 1, tourner le plateau de manière à obtenir le minimum de déviation. Relever l'angle de déviation β1. En déduire λ.
Pour le calcul d'incertitude, il faut tenir compte de l'incertitude de la détermination du minimum de déviation.
[14]
![]() Procéder aux mesures à l'ordre 1 et à l'ordre 2. Faire un tableau comportant le nom de couleur de la raie, l'angle β1 minimal avec son incertitude, l'angle β2 minimal
avec son incertitude, et les longueurs d'onde calculées avec la relation avec leur incertitude.
Procéder aux mesures à l'ordre 1 et à l'ordre 2. Faire un tableau comportant le nom de couleur de la raie, l'angle β1 minimal avec son incertitude, l'angle β2 minimal
avec son incertitude, et les longueurs d'onde calculées avec la relation avec leur incertitude.
4. Annexe : simulation
import numpy as np
from matplotlib.pyplot import *
L = 500 # longueur d'onde (nm)
n = 300 # nombre de traits par mm
a = 1/n
i = np.linspace(-2,2,1000) # angle d'incidence en degrés
alpha_1 = np.arcsin(L*1e-6/a+np.sin(i*np.pi/180))*180/np.pi
alpha_m1 = np.arcsin(-L*1e-6/a+np.sin(i*np.pi/180))*180/np.pi
Lmesuree = a*1e6*np.sin((alpha_1-alpha_m1)/2*np.pi/180)
figure()
plot(i,Lmesuree-L,'k-')
xlabel(r"$i\ (\rm deg)$")
ylabel(r"$\lambda_{\rm mes}-\lambda\ (\rm nm)$")
title(r"$n=%d\ {\rm t/mm},\ \lambda=%d\,\rm nm$"%(n,L))
grid()
ecartLongueurOnde.pdf
i = np.linspace(-10,10,1000) # angle d'incidence en degrés
alpha_1 = np.arcsin(L*1e-6/a+np.sin(i*np.pi/180))*180/np.pi
alpha_m1 = np.arcsin(-L*1e-6/a+np.sin(i*np.pi/180))*180/np.pi
beta_1 = alpha_1 - i
beta_m1 = alpha_m1-i
figure()
plot(i,beta_1,'k-',label=r"$\beta_1$")
plot(i,-beta_m1,'k--',label=r"$\beta_{-1}$")
xlabel(r"$i\ (\rm deg)$")
legend(loc='upper right')
title(r"$n=%d\ {\rm t/mm},\ \lambda=%d\,\rm nm$"%(n,L))
grid()
deviation.pdf
i = np.linspace(-20,20,1000) # angle d'incidence en degrés
alpha_2 = np.arcsin(2*L*1e-6/a+np.sin(i*np.pi/180))*180/np.pi
alpha_m2 = np.arcsin(-2*L*1e-6/a+np.sin(i*np.pi/180))*180/np.pi
beta_2 = alpha_2 - i
beta_m2 = alpha_m2-i
figure()
plot(i,beta_2,'k-',label=r"$\beta_2$")
plot(i,-beta_m2,'k--',label=r"$\beta_{-2}$")
xlabel(r"$i\ (\rm deg)$")
legend(loc='upper right')
title(r"$n=%d\ {\rm t/mm},\ \lambda=%d\,\rm nm$"%(n,L))
grid()
 deviation2.pdf
deviation2.pdf
5. Annexe : calcul d'incertitudes
On rappelle le principe du calcul des incertitudes par une simulation de Monte-Carlo.
Soit X une grandeur dont une mesure donne une valeur X0 avec une incertitude ΔX. On simule un ensemble de N mesures en supposant que les valeurs sont réparties selon une loi de probabilité normale d'espérance X0 et d'écart-type ΔX :
from numpy.random import normal
import numpy as np
X_rand = normal(X0,DeltaX,N)
Soit Y une grandeur calculée à partir de la grandeur mesurée au moyen d'une fonction :
Y_rand = calculY(X_rand)
La valeur de Y est la moyenne arithmérique des valeurs aléatoires :
Y0 = Y_rand.mean()
L'incertitude de Y est l'écart-type empirique :
DeltaY = Y_rand.std()
Dans le cas où un ajustement affine sur des données expérimentales conduit à des coefficients a et b, il faut déterminer les incertitudes Δa et Δb. Il faut pour cela faire N fois l'ajustement affine avec à chaque fois un jeu de données aléatoires obtenues à partir des valeurs expérimentales et de la loi normale (d'espérance la valeur expérimentale et d'écart-type l'incertitude). On obtient ainsi deux tableaux a_rand et b_rand contenant les coefficients de ces N ajustements affines. Les incertitudes Δa et Δb s'en déduisent par le calcul des écart-types.