Frottement solide
1. Observations expérimentales
1.a. Forces de contact
On s'intéresse à des corps à l'état solide, faits d'un matériau dont la déformation peut être négligée à l'échelle de l'expérience ou du disposif technologique. Par exemple, une pièce en acier présente le plus souvent une déformation négligeable. Au contraire, la déformation d'un pneu de roue de voiture n'est pas négligeable. Pour ces corps de déformation négligeable, on peut généralement utiliser le modèle du solide indéformable, qui consiste à l'assimiler à un système parfaitement rigide.
Lorsque deux solides sont en contact, il y a des forces de contact qui s'exercent. D'après le principe des actions réciproques, la force exercée par le solide 1 sur le solide 2 est opposée à la force exercée par le solide 2 sur le solide 1.
L'origine physique de ces forces réside dans les déformations microscopiques qui ont lieu dans la zone de contact. Le modèle du solide indéformable n'est qu'une approximation géométrique : il y a nécessairement des déformations, même si elles sont invisibles, qui expliquent les forces.
La force de contact est séparée en deux composantes, une composante normale, c'est-à-dire perpendiculaire à la surface de contact, et une composante tangentielle, que l'on appelle la force de frottement.
Figure pleine page{kind=link}
1.b. Force d'adhérence (frottement statique)
Pour mettre en évidence la force de frottement entre deux solides, on utilise le dispositif suivant, constitué d'un bloc solide (par exemple en bois) posé sur un support solide fixé horizontalement. Un dynamomètre à ressort accroché au bloc permet de lui appliquer une force F tangentielle. En tirant progressivement sur l'autre extrémité du ressort, on fait varier continûment cette force en partant de zéro. La déformation du ressort (bien visible à l'œil nu) permet de mesurer la force. Pour plus de précision, on ajoute un dynamomètre à jauge de déformation derrière le ressort.
Figure pleine page{kind=link}
La vidéo ci-dessous montre l'expérience réalisée avec un bloc en bois de masse m=210 g glissant sur une table en mélaminé. Le dynamomètre est tiré à la main. La fréquence d'échantillonnage (vidéo et force) est 100 Hz. La lecture de la vidéo à 30 images par seconde donne donc un ralenti d'un facteur 3,3.
Voici la force en fonction du temps :
 figA.pdf
figA.pdf
On constate que le bloc reste immobile tant que la force F ne dépasse pas une certaine valeur, égale à environ 1,0 N dans cette expérience. Tant que le solide ne glisse pas sur le support, on est en situation d'adhérence. Pour interpréter cela, il faut introduire la résultante des forces exercées par le support (ou réaction du support), en décomposant en une partie normale et une partie tangentielle :
Comme le bloc est au repos dans le référentiel du support (supposé galiléen), sa quantité de mouvement est nulle donc la somme des forces qui s'exercent sur lui est nulle :
La force P est la force pressante, égale au poids sur cet exemple.
On représente ces forces sur un schéma vectoriel :
Figure pleine page{kind=link}
La réaction normale du support est donc exactement opposée au poids. Physiquement, cette force vient de la compression du support dans le sens normal, sous l'effet du poids du bloc, ou plus généralement sous l'effet de la force pressante. On voit aussi qu'il y a une force tangentielle T exercée par le support, opposée à la force F appliquée par l'opérateur. Il s'agit d'une force d'adhérence, appelée aussi force de frottement statique.
Cette expérience nous montre qu'il se développe une force d'adhérence qui vient s'opposer à la force appliquée, pour empêcher le mouvement, et que l'intensité de cette force (la norme du vecteur) ne peut dépasser une valeur maximale :
En refaisant plusieurs fois l'expérience, on constate que la force maximale n'est pas toujours la même. En particulier, elle varie notablement suivant l'emplacement du support où le bloc est posé. Elle dépend également du temps de repos sur le support. En tenant compte de ces variations sous forme d'une incertitude, on arrive néanmoins à mesurer cette force maximale, à 10 pour-cent près. Pour le bloc de masse m=210 g, nous obtenons Tmax=1,0 N.
Comment cette force limite dépend-elle de la masse du corps ? La vidéo suivante montre l'expérience avec une masse double, soit m=420 g :
Voici la force en fonction du temps :
 figB.pdf
figB.pdf
La force maximale Tmax est environ deux fois plus grande avec un poids deux fois plus grand. On constate sur cet enregistrement que le bloc tiré adhère à nouveau à la table à environ t=10 s avant de glisser à nouveau un peu plus tard. Des expériences systématiques, réalisées depuis plus de deux siècles avec de nombreux matériaux, ont montré que la force maximale augmente proportionnellement au poids. Plus généralement, la force maximale est proportionnelle à la force pressante, c'est-à-dire à la force normale N :
La constante μs est le coefficient de frottement statique. La valeur obtenue dans cette expérience μs=0,5. La grande variabilité des valeurs obtenues d'une expérience à l'autre ne permet pas d'attribuer plus d'un chiffre significatif à cette valeur.
En posant le bloc sur une face de plus faible aire, sans modifier son poids, on constate que la force maximale ne change pratiquement pas. La force maximale est en effet indépendante de l'aire de la surface de contact. On peut le constater en tirant une table posée sur le sol : lorsque la table est posée sur le plateau, la force à appliquer n'est pas plus grande que lorsqu'elle repose sur ses quatre pieds. Bien que l'aire apparente de contact soit beaucoup plus faible avec les pieds, la pression normale (force divisée par l'aire) est aussi beaucoup plus forte. En fait, la pression multipliée par l'aire est la même dans les deux cas. L'adhérence est une force à la fois proportionnelle à la pression normale et à l'aire. Exprimée en fonction de la force normale, elle est donc indépendante de l'aire.
1.c. Frottement de glissement
Lorsque la force appliquée F atteint la valeur maximale Tmax de la force d'adhérence, le bloc se met en mouvement, c'est-à-dire glisse sur le support. En continuant à tirer très lentement sur le ressort, on constate que la force reste à une valeur proche de Tmax mais le plus souvent légèrement inférieure et très fluctuante.
Une étude plus précise montrerait que la force de frottement T qui apparaît en présence de glissement a la même direction que la vitesse de glissement, tout en étant de sens opposé. Passé la phase d'accélération, le bloc garde une quantité de mouvement constante donc la somme des forces est nulle. La figure suivante montre les forces en jeu et la vitesse de glissement :
Figure pleine page{kind=link}
Lorsque la vitesse du bloc reste constante, on mesure bien avec le dynamomètre la force de frottement T. Il s'agit d'une force de frottement de glissement, à ne pas confondre avec la force de frottement statique observée en situation d'adhérence. Cette force vérifie néanmoins la même propriété que la force d'adhérence maximale vis à vis de la force normale, c'est-à-dire qu'elle est proportionnelle à la force normale :
En réalité, la force de frottement enregistrée pendant l'expérience n'est pas tout à fait constante mais fluctue de manière aléatoire. Cela est dû aux variations du coefficient de frottement lorsqu'on se déplace sur la surface de la table. Le coefficient de frottement est en effet très sensible à l'état de surface et à la présence de poussières ou d'autres polluants.
La constante μ est le coefficient de frottement dynamique. Dans l'expérience du bloc en bois glissant sur la surface mélaminée, on obtient μ=0,25, soit deux fois moins que le coefficient de frottement statique. On constate souvent que le coefficient dynamique est inférieur au coefficient statique, parfois pratiquement égal. En fait, les choses sont un peu plus complexes car le coefficient statique dépend aussi du temps de repos du bloc après sa dernière phase de glissement (il augmente lorsque le temps de repos dépasse quelques secondes).
Cette expérience ne permet pas vraiment de voir l'influence de la vitesse sur le coefficient de frottement, mais les études faites avec un tribomètre sur différents couples de matériaux ont montré que, dans la plupart des cas, la force de frottement varie peu avec la vitesse, tout au plus d'un facteur deux pour une variation de vitesse de plusieurs ordres de grandeur. Si on se limite à une plage de vitesse réduite, la variation est relativement faible. On peut donc simplifier les choses en affirmant que la force de frottement est indépendante de la norme de la vitesse de glissement (mais pas de sa direction). Néanmoins, cette propriété n'est pas aussi bien vérifiée que la proportionnalité avec la force normale.
Lorsque le système comporte une élasticité, comme c'est le cas dans l'expérience avec le ressort, il arrive que le glissement ne se fasse pas de manière permanente mais par une alternance de phase de d'adhérence et de glissement. Ce phénomène est appelé le collé-glissé (stick-slip en anglais). Voici comme exemple le glissement d'un bloc de bois sur une planche en bois :
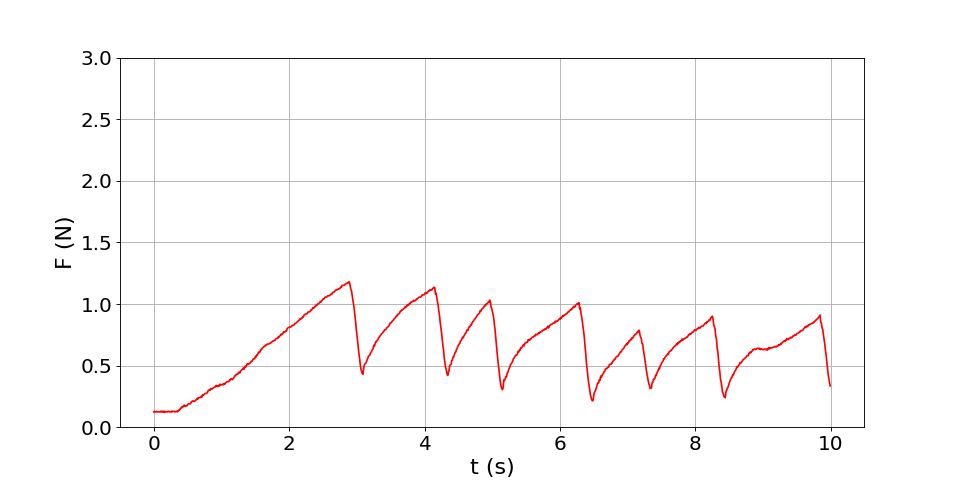 figC.pdf
figC.pdf
2. Modélisation du frottement solide
2.a. Lois de Coulomb
A. Coulomb (ingénieur et physicien Français, 1736-1806) a été le premier (en 1781) à étudier expérimentalement le frottement entre solides, en considérant des dizaines de cas (bois contre bois, contre métal, etc.). On peut dégager de ses expériences, et d'autres faites par la suite, des lois empiriques vérifiées par la grande majorité des corps solides en contact, du moins ceux que l'on rencontre dans les objets et machines. Aujourd'hui, la science du frottement (tribologie) étudie aussi le frottement à l'échelle microscopique, qui présente des propriétés différentes du frottement des objets macroscopiques. Ces lois, appelées aujourd'hui lois de Coulomb, ne sont pas des lois universelles comme les lois de Newton de la mécanique, mais constituent un modèle pour le frottement solide, qui peut s'appliquer, au moins approximativement, à la plupart des situations courantes, par exemple dans les machines.
La première loi de Coulomb s'applique en l'absence de glissement :
La force de frottement statique (force d'adhérence) ne peut dépasser une valeur qui est proportionnelle à la force normale appliquée au corps :
Tant que cette inégalité est vérifiée, les deux corps ne glissent pas l'un sur l'autre.
Lorsqu'il y a glissement entre les deux corps, on appele vitesse de glissement d'un corps sa vitesse dans le référentiel constitué par l'autre corps (on se limite à un mouvement de translation).
La seconde loi de Coulomb précise les propriétés de la force de frottement en présence de glissement :
La force de frottement est de même direction et de sens opposé à la vitesse de glissement. Elle est indépendante de la norme de la vitesse de glissement et varie proportionnellement à la force normale :
Il est fréquent que l'on ajoute une simplification supplémentaire en supposant que les coefficients de frottement statique et dynamique sont égaux ()
2.b. Puissance dissipée
Considérons un solide (2) en contact avec un solide (1). Soient la force tangentielle exercée par (1) sur (2) et celle exercée par (2) sur (1). Soient la force normale exercée par (1) sur (2) et celle exercée par (2) sur (1).
On suppose que les deux solides sont en mouvement de translation dans le référentiel considéré. Notons la vitesse du solide (1) dans le référentiel considéré et celle du solide (2). Si le référentiel est lié à l'un des deux solides, comme dans l'expérience décrite précédemment, sa vitesse est bien sûr nulle. La vitesse de chacun des deux solides (qui restent en contact) est nécessairement tangentielle, ce qui fait que les forces normales ne travaillent pas. La puissance des forces de contact est donc celle des forces tangentielles :
est la vitesse de glissement du solide (2) par rapport au référentiel (1), c'est-à-dire la vitesse de translation du solide (2) dans le référentiel constitué par le solide (1). En l'absence de glissement, la puissance des forces de contact est donc nulle.
En présence de glissement, d'après la seconde loi de Coulomb, la force tangentielle est opposée à la vitesse de glissement. La puissance s'écrit donc :
Cette puissance est toujours négative, ce qui traduit le fait que la force de frottement s'oppose au glissement. La force de frottement est une force non conservative, car son travail dépend du chemin suivi (il n'est pas possible de lui associer une énergie potentielle). Écrivons le théorème de l'énergie mécanique à un système dans lequel des forces de frottement interviennent (et toutes les autres forces sont conservatives) :
Il s'agit d'une force dissipative car elle conduit toujours à une diminution de l'énergie mécanique du système.
2.c. Exemple : objet sur un plan incliné
La force de frottement statique permet aux objets de rester au repos lorsque le support est incliné par rapport à l'horizontale. On considère un bloc posé sans vitesse initiale sur un plan incliné.
Figure pleine page{kind=link}
Dans ce type de problème, on ne sait pas a priori si le solide glisse sur le support. On commence par supposer qu'il n'y a pas de glissement du solide par rapport au support. Dans le cas présent, cela revient à supposer que le bloc est au repos dans le référentiel terrestre (galiléen). Cette hypothèse se traduit par une somme de forces nulle :
Le poids comporte une composante normale, qui consitue une force pressante, et une composante tangentielle dirigée vers le bas, qui est l'équivalent de la force F de l'exemple précédent.
En projetant sur la base orthonormée définie sur la figure :
L'équilibre du bloc, s'il est réalisé, doit s'expliquer par la force de frottement statique Tx, qui est négative, c'est-à-dire opposée à la composante tangentielle du poids. La composante normale de la réaction du support est positive.
Pour savoir si cette force d'adhérence est possible, on applique la loi de Coulomb :
qui conduit à la relation :
Si cette condition est vérifiée, alors le bloc posé initialement sans vitesse reste bien au repos. On remarque que cette condition ne dépend pas de la masse du corps (ni de l'aire de la surface de contact). C'est une conséquence de la proportionnalité entre la force de frottement et la force pressante normale. On voit aussi que le plan incliné est un moyen simple de mesurer un coefficient de frottement statique. Pour μs=0,5, une valeur courante, l'angle limite est de 26 degrés.
Une manière simple de réaliser l'expérience consiste à partir d'une inclinaison faible et à l'augmenter très lentement jusqu'à observer le glissement du bloc. La vidéo ci-desous montre un exemple :
Supposons que la condition soit satisfaite et voyons ce qui change si l'on applique une vitesse initiale au bloc, dans la direction descendante :
La vitesse est nécessairement une fonction continue du temps, du moins lorsque les forces restent finies. Il y a donc une phase du mouvement avec glissement du bloc par rapport au support. La vitesse de glissement est :
Compte tenu de la vitesse initiale, la composante vx est certainement positive. La force de frottement, qui est opposée à la vitesse de glissement, s'écrit donc :
L'équation du mouvement du bloc (qui est en mouvement de translation), s'écrit :
En projection sur la base, on obtient :
On obtient finalement l'équation différentielle pour la vitesse :
Le coefficient de frottement dynamique est inférieur au coefficient statique. Il faut donc envisager deux cas : et .
Si , le bloc subit une déccélération constante. On en déduit aisément la vitesse vx(t). On constate que celle-ci s'annule après un temps :
Pour t>τ, le bloc est au repos sur le support.
La vidéo suivante montre une expérience correspondant à ce cas :
Le travail de la force de frottement au cours de la phase de glissement est :
où L est le déplacement du bloc. Ce travail est négatif : l'énergie cinétique initiale du bloc est entièrement dissipée dans la matière, c'est-à-dire transformée en énergie interne. En pratique, cette dissipation se traduit par un échauffement dans la zone de contact. Il peut aussi de produire un phénomène d'abrasion : une petite partie de la matière est arrachée au cours du frottement. Dans la plupart des cas, l'abrasion est un phénomène microscopique qui se manifeste seulement après un long frottement (par exemple dans les freins de voiture).
Si alors le bloc subit une accélération constante donc sa vitesse de glissement augmente. La vidéo suivante montre une expérience correspondant à ce cas :