Correcteur proportionnel-intégrale-dérivée
1. Introduction
On considère un système linéaire définie par sa fonction de transfert A(p) ( en régime sinusoïdal). Son entrée et sa sortie sont notées respectivement E et S. L'asservissement du système a pour objectif de rendre la sortie S la plus proche possible d'une valeur de consigne, notée Sc (la sortie est asservie à la consigne). La figure suivante montre le schéma général de la boucle d'asservissement avec un correcteur :
Figure pleine page{kind=link}
La rétroaction est constituée d'une chaîne de mesure, de fonction de transfert B(p), qui permet de mesurer la sortie S. L'erreur est . En l'absence de correction, celle-ci est directement injectée dans l'entrée du système. L'objectif est que S soit le plus proche possible de Sc et, en cas de changement brusque de cette dernière, la sortie doit parvenir le plus rapidement possible à sa valeur stationnaire. Il est parfois possible de modifier A(p) et B(p) afin d'obtenir la réponse souhaitée mais cette approche est très limitée. Pour modifier la réponse du système asservi, on ajoute un correcteur, supposé linéaire et défini par sa fonction de transfert C(p). En présence du correcteur, E(p)=C(p)(Sc-B(p)S(p)).
La fonction de transfert du système asservi est :
Le correcteur proportionnel-intégrale-dérivée (PID) est défini par la :
c'est-à-dire, dans le domaine temporel :
Une autre écriture du correcteur PID est :
où les deux constantes positives Ti,Td ont les dimensions d'un temps.
Ce document montre comment simuler la réponse temporelle d'un système asservi avec un correcteur PID et montre une procédure de réglage de ses paramètres. On suppose que le retard introduit par la chaîne de mesure est négligeable, c'est-à-dire que B(p)=1. On étudiera le cas d'un système A(p) d'ordre 1 et le cas d'un système d'ordre 2.
2. Système d'ordre 1
2.a. Fonction de transfert et stabilité
Le système considéré est du premier ordre, avec une pulsation de coupure . Sa fonction de transfert est de la forme :
La fonction de transfert du système asservi (avec ) muni du correcteur PID est donc :
Remarquons que A0Kp est nécessairement positif (on se placera dans le cas où ces deux constantes sont positives) donc les coefficients de la fonction de transfert (de la fraction rationnelle) sont positifs.
L'équation différentielle se déduit de la fonction de transfert :
La solution générale de cette équation est la somme d'une solution particulière et de la solution générale de l'équation sans second membre. Cette dernière est une combinaison linéaire des solutions de la forme , où p est solution de :
Autrement dit, p est un pôle de la fonction de transfert. Le système est stable si la solution générale de l'équation sans second membre tend vers zéro lorsque t tend vers l'infini, c'est-à-dire si tous les pôles ont une partie réelle strictement négative. Une partie réelle nulle conduit à une oscillation sinusoïdale permanente, que l'on peut aussi considérer comme une instabilité. Les pôles sont les solutions de l'équation , dont le discriminant est . Si , les pôles sont :
a, b et c sont positifs donc ces deux pôles réels sont négatifs.
Si , les pôles sont :
a et b sont positifs donc la partie réelle de ces pôles est négative.
Enfin dans le cas où , le pôle double est un réel négatif.
Le système d'ordre 1 asservi avec le correcteur PID est donc toujours stable.
2.b. Régime stationnaire
Lorsque Sc est constante, la sortie S parvient à une valeur stationnaire déterminée par la valeur de la fonction de transfert à fréquence nulle. Si :
mais si le terme intégrateur est absent () on a :
Dans le premier cas l'erreur en régime stationnaire est nulle mais dans le second cas :
Conclusion : en l'absence de l'intégrateur, l'erreur en régime stationnaire est non nulle et cette erreur est d'autant plus petite que Kp est grand; en présence du terme intégrateur, l'erreur en régime stationnaire est nulle.
2.c. Réponse à un échelon
On considère un échelon de la commande Sc : pour t<=0 on a Sc=0 et pour t>0 on a Sc=Sc0.
Sans intégrateur
Sans intégrateur (1/Ti=0), la fonction de transfert s'écrit :
donc l'équation différentielle est :
Le temps caractéristique est :
et la réponse à l'échelon s'écrit :
La sortie tend donc vers la valeur stationnaire de manière monotone (sans dépassement) avec un temps caractéristique d'autant plus petit que Kp est grand. Le dérivateur n'a pas d'intérêt dans ce cas puisqu'il ne fait qu'allonger le temps de réponse. En l'absence d'intégrateur, on utilise seulement le correcteur proportionnel, avec l'inconvénient d'une erreur en régime stationnaire mais qui se réduit si Kp est grand.
En conclusion, pour un système d'ordre 1, le correcteur proportionnel suffit et permet de réduire le temps de réponse. Si Kp est assez grand, l'erreur est négligeable.
Avec intégrateur
La fonction de transfert est et l'équation différentielle . La forme de la réponse est déterminée par le signe de et le temps de réponse est déterminé par la partie réelle des pôles. Le discriminant est :
Si Ki est suffisamment faible, Δ>0 donc la solution s'écrit :
avec et . La sortie tend vers la consigne de manière monotone avec un temps caractéristique égal au plus grand de et , qui est :
Cette durée diminue lorsque Ki augmente. L'effet de Kd n'est pas évident.
On constate que , ce qui montre que l'introduction de l'intégrateur ne fait que retarder la réponse. De plus, si Ki est assez grand, Δ devient négatif et des oscillations amorties apparaissent. Cela confirme que l'intégrateur n'a aucun intérêt pour un système d'ordre 1.
2.d. Simulation
On cherche à obtenir la réponse à un échelon avec le correcteur PID (Ki non nul). Pour un système d'ordre 1, la résolution analytique est aisée mais nous adoptons une méthode entièrement numérique, consistant à résoudre l'équation différentielle. On pose et . Le système différentiel d'ordre 1 à résoudre est :
Nous considérons par convention la condition initiale y0(0)=0,y1(0)=0, même si en réalité d'autres conditions initiales sont possibles.
La fonction suivante effectue l'intégration numérique de ce système. Les paramètres du correcteur à fournir sont Kp,Ti,Td.
import numpy as np from matplotlib.pyplot import * from scipy.integrate import odeint def reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N,rtol=1e-4,atol=1e-4): Sc0 = 1 def systeme(Y,t): dY0 = Y[1] dY1 = 1/(A0*Kp*Td+T)*(A0*Kp/Ti*Sc0-(A0*Kp+1)*Y[1]-A0*Kp/Ti*Y[0]) return [dY0,dY1] temps = np.linspace(0,tmax,N) sol = odeint(systeme,[0,0],temps,rtol=rtol,atol=atol) return temps,sol[:,0]
La fonction suivante permet de contrôler directement les constantes Kp,Ki,Kd :
def reponsePIDordre1_bis(A0,T,Kp,Kd,Ki,tmax,N,rtol=1e-4,atol=1e-4): return reponsePIDordre1(A0,T,Kp,Kp/Ki,Kd/Kp,tmax,N,rtol,atol)
La fonction suivante effectue la résolution pour le correcteur proportionnel seul :
def reponsePordre1(A0,T,Kp,tmax,N,rtol=1e-4,atol=1e-4): Sc0 = 1 def systeme(Y,t): return 1/T*(A0*Kp*Sc0-(A0*Kp+1)*Y[0]) temps = np.linspace(0,tmax,N) sol = odeint(systeme,[0],temps,rtol=rtol,atol=atol) return temps,sol[:,0]
On commence par étudier l'influence de Ti en l'absence de dérivateur (correcteur PI) :
T = 1
A0 = 1
Kp = 100
Td = 0
tmax=1
N=1000
figure(figsize=(16,6))
title("T = 1 s, Kp = 100")
Ti = 0.01
t,S = reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$T_i=0,01\,\rm s$")
Ti = 0.1
t,S = reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$T_i=0,1\,\rm s$")
Ti = 1
t,S = reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$T_i=1\,\rm s$")
grid()
t,S = reponsePordre1(A0,T,Kp,tmax,N)
plot(t,S,label=r"$T_i=\infty$")
grid()
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
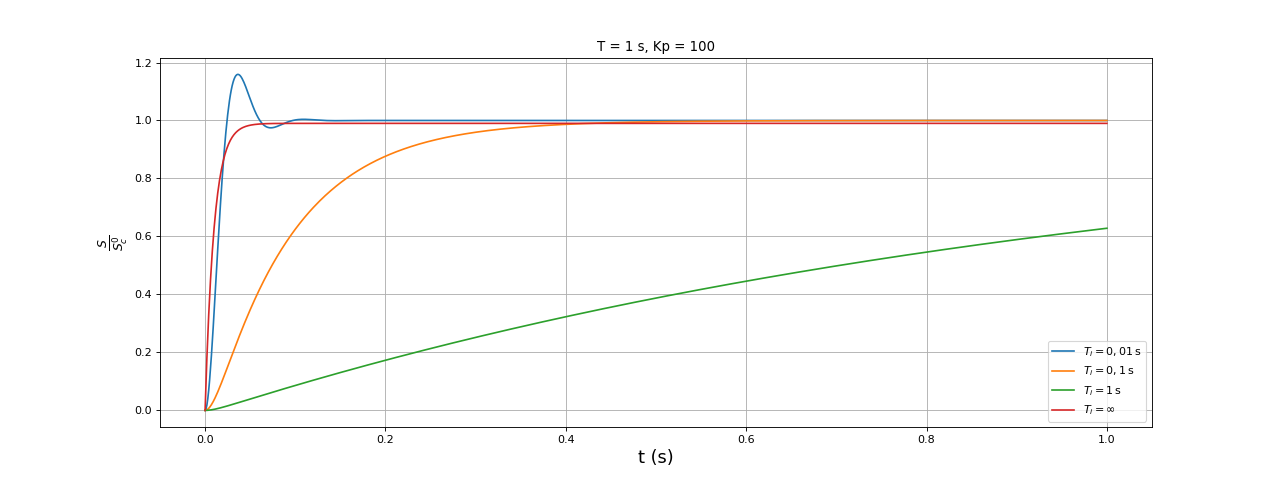 fig1.pdf
fig1.pdf
Ces courbes confirment la conclusion énoncée plus haut : l'intégrateur ne fait que retarder la réponse ou introduit un dépassement avec une oscillation. Pour un système d'ordre 1, le correcteur proportionnel suffit, à condition de Kp soit assez grand pour que l'erreur soit négligeable.
Voyons l'effet du dérivateur :
T = 1
A0 = 1
Kp = 100
Td = 0.1
tmax=1
N=1000
figure(figsize=(16,6))
title("T = 1 s, Kp = 100")
Ti = 0.01
t,S = reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$T_i=0,01\,\rm s$")
Ti = 0.1
t,S = reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$T_i=0,1\,\rm s$")
Ti = 1
t,S = reponsePIDordre1(A0,T,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$T_i=1\,\rm s$")
grid()
t,S = reponsePordre1(A0,T,Kp,tmax,N)
plot(t,S,label=r"$T_i=\infty$")
grid()
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
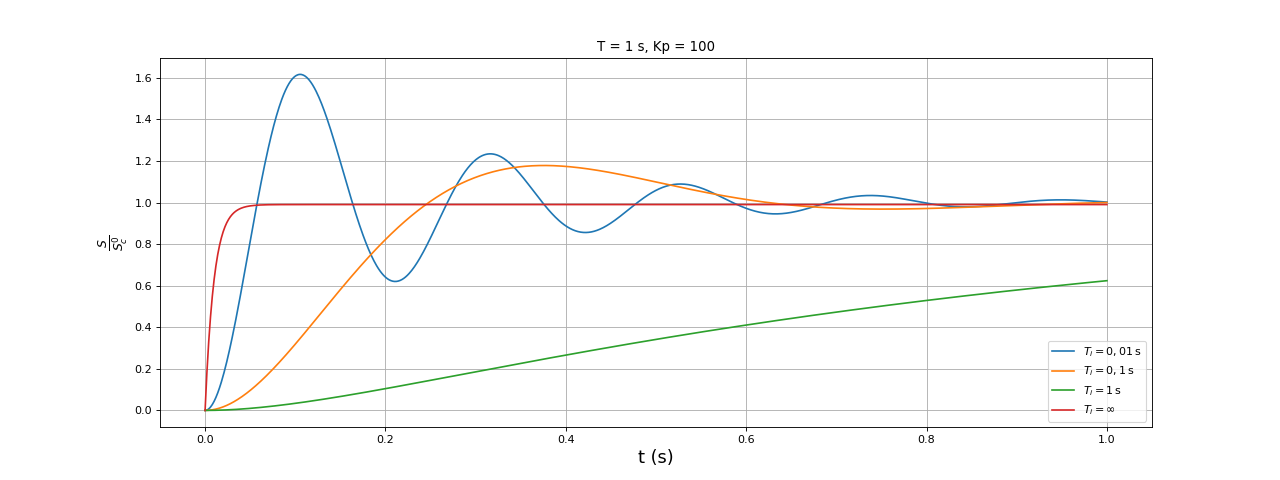 fig2.pdf
fig2.pdf
Le dérivateur introduit un comportement oscillatoire (Δ<0) avec un dépassement très important, ce qui est évidemment néfaste.
3. Système d'ordre 2
3.a. Fonction de transfert et stabilité
La fonction de transfert du système est de la forme :
Si m>1, la réponse indicielle du système est de type amortie, si m<1 elle est de type oscillatoire amortie et si m=1 elle est de type critique.
La fonction de transfert du système asservi est :
Dans le cas du correcteur proportionnel seul ( et ), la fonction de transfert est :
Le système avec le correcteur proportionnel seul est toujours stable.
Dans le cas du correcteur PID complet, la stabilité est plus difficile à étudier puisqu'il faudrait connaître les pôles de la fonction de transfert. Le critère de Routh [1] permet de déterminer la stabilité au moyen d'opérations algébriques sur les coefficients du dénominateur.
Le système est stable si et seulement si tous les coefficients de la première colonne sont de même signe. Seul celui de la troisième ligne peut être négatif donc la condition de stabilité est :
En conséquence, une valeur trop petite de Ti, c'est-à-dire trop grande de Ki, peut rendre le système instable.
3.b. Réponse à un échelon
Correcteur proportionnel
La valeur stationnaire de la sortie est déterminée par :
qui est le même résultat que pour le système d'ordre 1 avec le correcteur proportionnel. L'erreur est donc d'autant plus petite que Kp est grand. Le discriminant de ce système d'ordre 2 s'écrit :
Si m<1, la réponse est oscillatoire amortie (comme celle du système non asservi). Si m>1, une valeur trop grande de Kp est susceptible de conduire à , c'est-à-dire à un comportement oscillatoire de la réponse indicielle.
En conclusion, une augmentation de Kp peut faire apparaître un comportement oscillatoire avant que l'erreur n'atteigne un niveau assez bas.
Correcteur PID
On a H(0)=1 donc l'erreur en régime stationnaire est nulle.
Il est difficile de mener une étude analytique de la réponse indicielle car celle-ci nécessite la connaissance de l'expression des pôles de la fonction de transfert (racines d'un polynôme de degré 3).
3.c. Simulation
La simulation consiste à résoudre numériquement les équations différentielles pour une consigne constante.
Pour le correcteur proportionnel, on pose et et le système différentiel s'écrit :
La fonction suivante effectue la résolution pour le correcteur proportionnel seul :
def reponsePordre2(A0,T,m,Kp,tmax,N,rtol=1e-4,atol=1e-4): Sc0 = 1 def systeme(Y,y): dY0 = Y[1] dY1 = 1/T**2*(A0*Kp*Sc0-2*m*T*Y[1]-(1+A0*Kp)*Y[0]) return [dY0,dY1] temps = np.linspace(0,tmax,N) sol = odeint(systeme,[0,0],temps,rtol=rtol,atol=atol) return temps,sol[:,0]
Voyons l'effet du correcteur proportionnel lorsque m>1 (réponse amortie du système non asservi) :
T = 1
m = 5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=5")
Kp = 10
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=10$")
Kp = 20
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=20$")
Kp = 50
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=50$")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=100$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
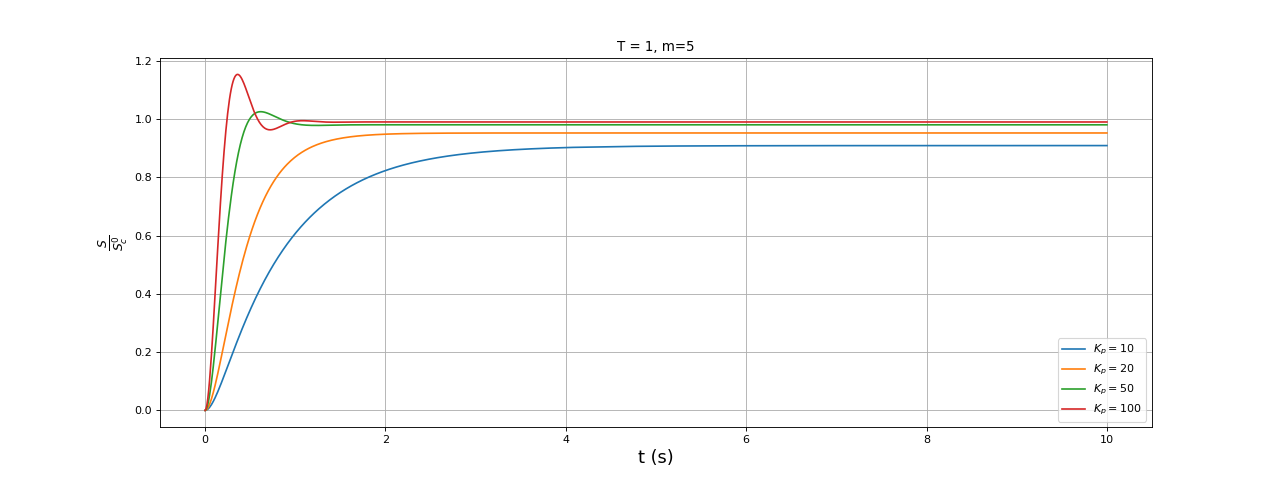 fig3.pdf
fig3.pdf
Un valeur assez grande de Kp est nécessaire pour obtenir une erreur assez faible. Augmenter Kp permet de réduire le temps de réponse mais une valeur trop grande fait ressortir le comportement oscillatoire avec un dépassement important.
Voici l'effet du correcteur proportionnel lorsque m<1 (réponse non amortie du système non asservi) :
T = 1
m = 0.5
A0 = 1
tmax = 20
N = 1000
figure(figsize=(16,6))
title("T = 1, m=0,5")
Kp = 10
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=10$")
Kp = 50
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=50$")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$K_p=100$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
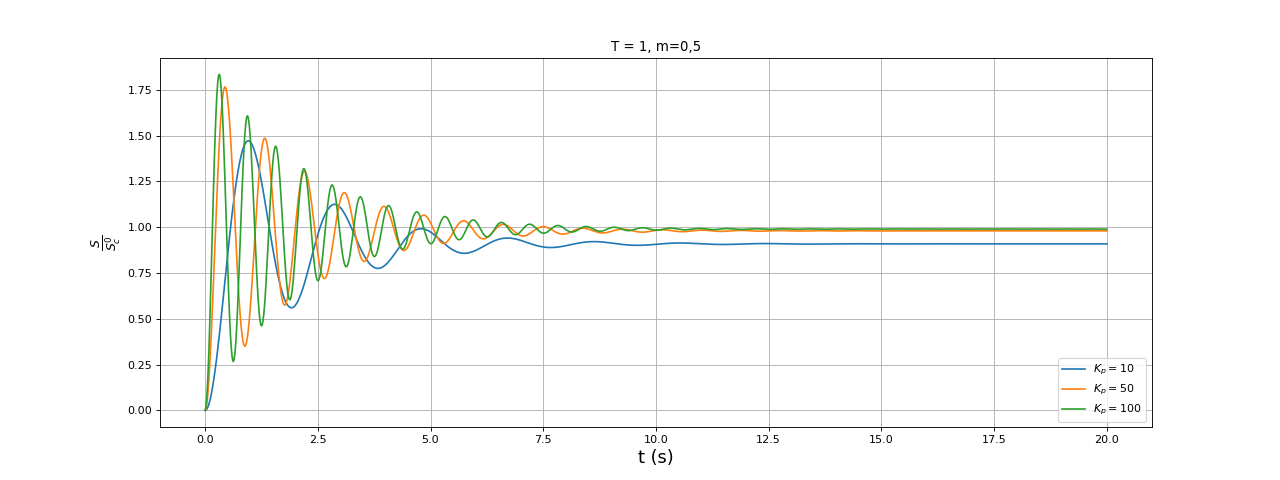 fig4.pdf
fig4.pdf
Comme prévu, la réponse est toujours oscillatoire amortie. L'augmentation de Kp permet de réduire l'erreur mais ne change rien au temps de réponse tout en accentuant le dépassement.
Ces simulations montrent bien les limites du correcteur proportionnel dans le cas d'un système d'ordre 2, alors qu'il est tout à fait suffisant pour un système d'ordre 1.
Pour le correcteur PID, on pose , et . Le système différentiel pour une consigne constante est :
La fonction suivante effectue la résolution pour le correcteur PID :
def reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N,rtol=1e-4,atol=1e-4): Sc0 = 1 def systeme(Y,y): dY0 = Y[1] dY1 = Y[2] dY2 = 1/T**2*(A0*Kp*(Sc0-Y[0])/Ti-(2*m*T+A0*Kp*Td)*Y[2]-(1+A0*Kp)*Y[1]) return [dY0,dY1,dY2] temps = np.linspace(0,tmax,N) sol = odeint(systeme,[0,0,0],temps,rtol=rtol,atol=atol) return temps,sol[:,0]
On commence par simuler la correction PI dans le cas m>1 en comparant au correcteur P :
T = 1
m = 5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Kp = 100
Ti = 1
Td = 0
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=1$")
Ti = 0.5
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=0,5$")
Ti = 0.3
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=0,3$")
Ti = 0.1
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=0,1$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
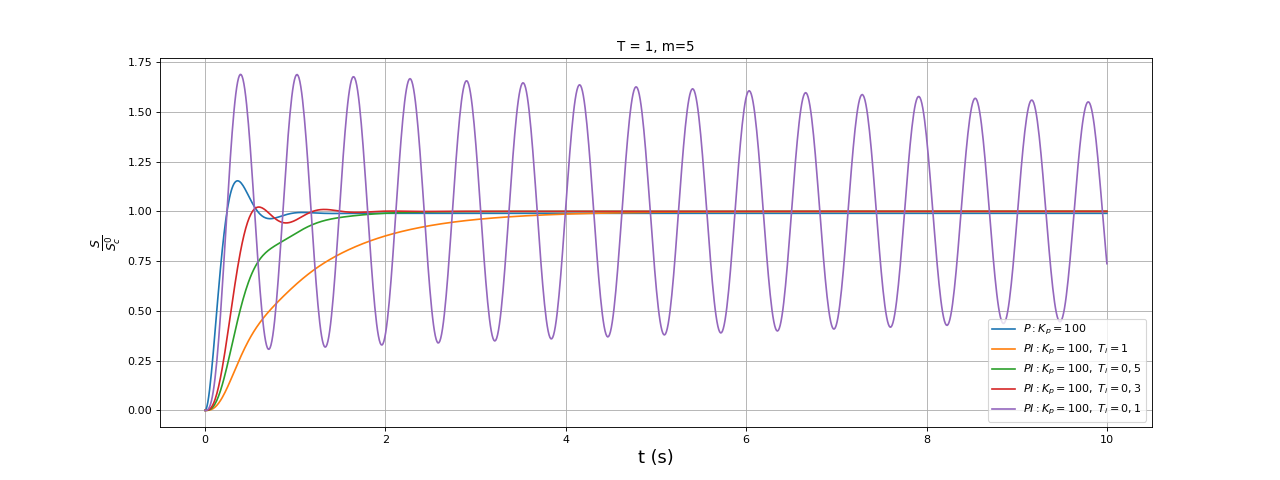 fig5.pdf
fig5.pdf
La comparaison est faite avec un correcteur proportionnel dont le coefficient Kp est assez grand pour donner une erreur négligeable mais qui présente un dépassement important. Le terme intégral permet de converger vers la valeur stationnaire sans dépassement tout en ayant une erreur stationnaire nulle. Cependant, une valeur trop petite de Ti, c'est-à-dire trop grande de Ki, introduit un comportement oscillatoire amorti puis à un comportement oscillatoire très peu amorti s'il est trop faible. La théorie prévoit un comportement instable si Ti et trop petit :
T = 1
m = 5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Kp = 100
Td = 0
Ti = 0.05
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=0,05$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
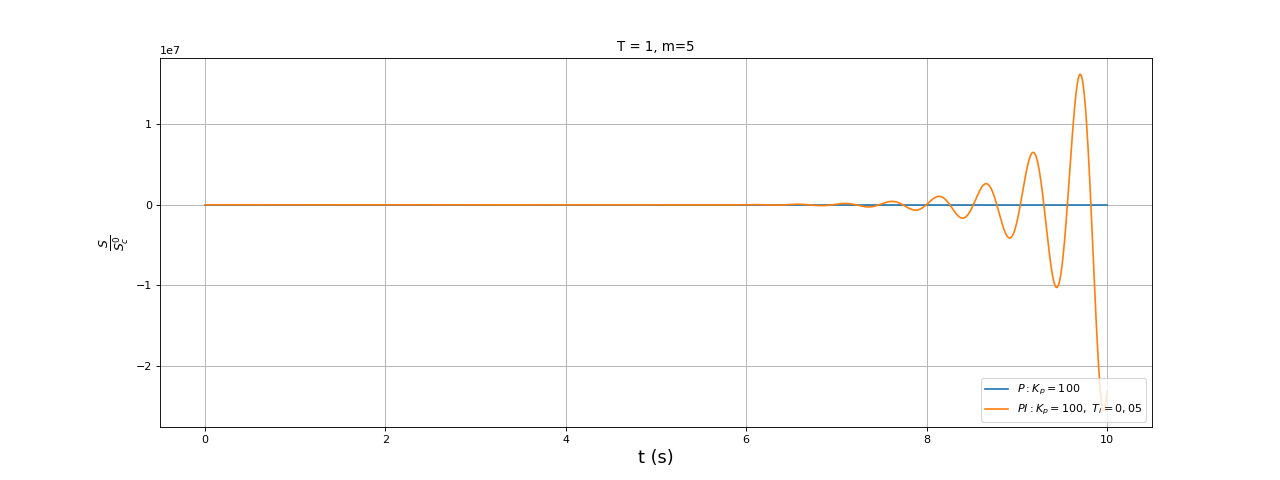 fig6.pdf
fig6.pdf
Il semble que la diminution de Ti conduise dans un premier temps à une augmentation du temps d'amortissement des oscillations puis à un comportement instable dès que la condition n'est plus satisfaite. Ce comportement se comprend aisément : la partie réelle d'un pôle, d'abord négative, augmente (sa valeur absolue diminue) puis devient positive. Autrement dit, une instabilité est précédée par un régime oscillant dans lequel le temps d'amortissement tend vers l'infini. La fonction suivante calcule la valeur de Ti en dessous de laquelle le système est instable :
def Ti_limite(A0,T,m,Kp,Td): return (T**2*A0*Kp)/((2*m*T+A0*Kp*Td)*(1+A0*Kp)) T = 1 m = 5 A0 = 1 Kp = 100 Ti_lim = Ti_limite(A0,T,m,Kp,Td)
print(Ti_lim) --> 0.09900990099009901
La valeur 0,1 de la simulation ci-dessus était donc très proche de l'instabilité (comportement oscillatoire très peu amorti). Pour exactement cette valeur, on a un comportement oscillatoire permanent (stabilité marginale).
Voici à présent une simulation de la correction PI dans le cas m<1 :
T = 1 m = 0.5 A0 = 1 Kp = 100 Td = 0 Ti_lim = Ti_limite(A0,T,m,Kp,Td)
print(Ti_lim) --> 0.9900990099009901
La valeur limite de Ti est plus grande.
T = 1
m = 0.5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=0,5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Kp = 100
Ti = 5
Td = 0
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=5$")
Ti = 1
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=100,\ T_i=1$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
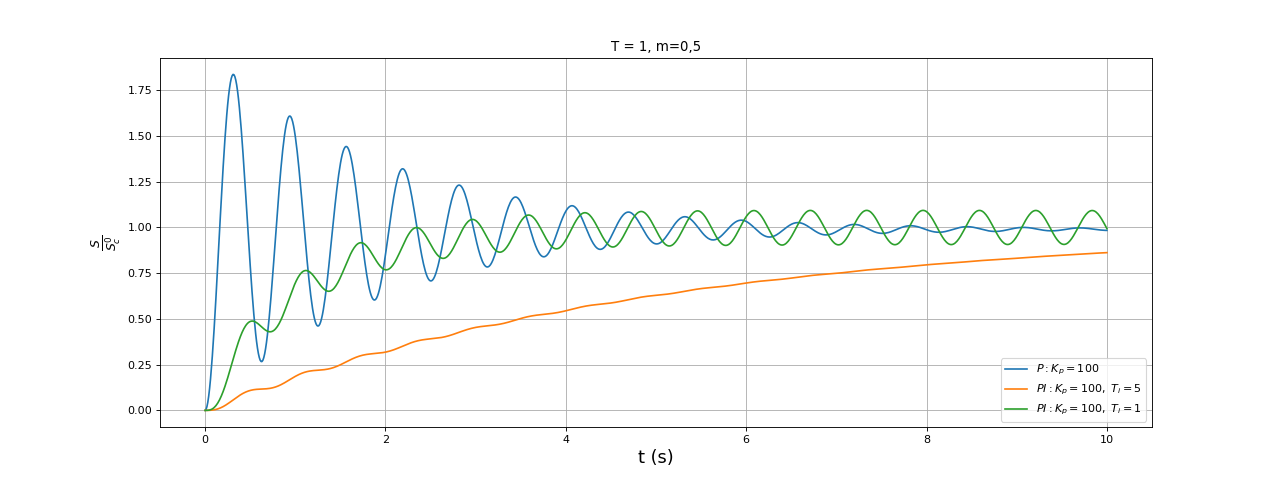 fig7.pdf
fig7.pdf
L'intégrateur permet d'éliminer les oscillations (et le dépassement associé) mais au prix d'une augmentation du temps de réponse. Si Ti est trop petit, un comportement oscillatoire peut apparaître puis l'instabilité s'il passe en dessous de la valeur limite.
Pour étudier l'effet du dérivateur, nous reprenons les deux simulations précédentes en y ajoutant le dérivateur :
T = 1 m = 5 A0 = 1 Kp = 100 Td = 1 Ti_lim = Ti_limite(A0,T,m,Kp,Td)
print(Ti_lim) --> 0.009000900090009001
Le dérivateur permet de réduire la valeur limite de Ti, ce qui est une bonne chose.
T = 1
m = 5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Kp = 100
Ti = 1
Td = 1
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=1,\ T_d=1$")
Ti = 0.5
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,5,\ T_d=1$")
Ti = 0.3
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,3,\ T_d=1$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
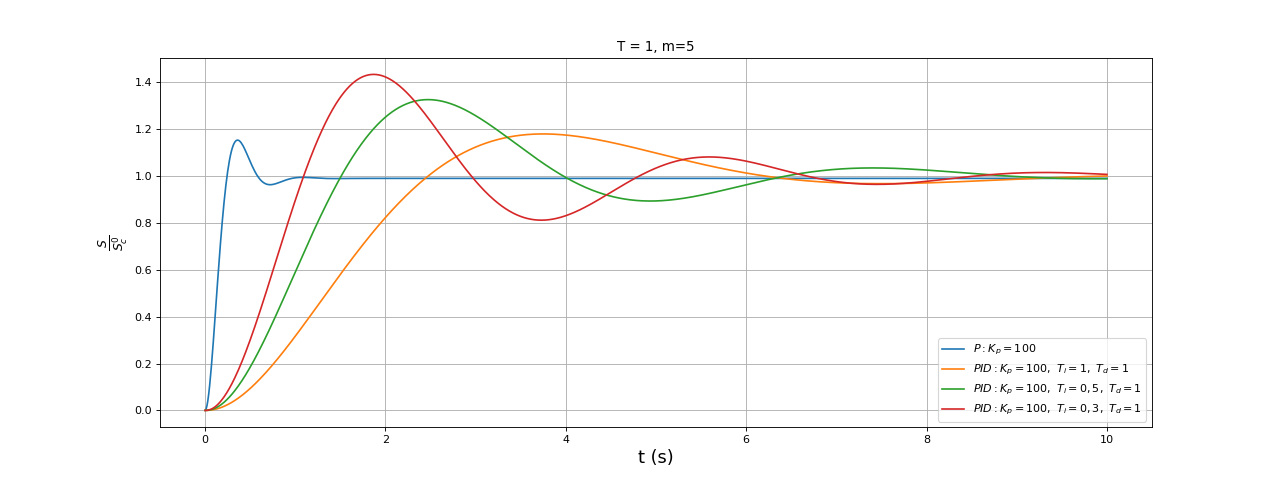 fig8.pdf
fig8.pdf
Dans ce cas, le dérivateur n'apporte pas d'amélioration mais au contraire un plus grand dépassement.
T = 1 m = 0.5 A0 = 1 Kp = 100 Td = 1 Ti_lim = Ti_limite(A0,T,m,Kp,Td)
print(Ti_lim) --> 0.009802960494069209
La valeur limite de Ti est plus grande.
T = 1
m = 0.5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=0,5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Kp = 100
Ti = 5
Td = 1
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=5,\ T_d=1$")
Ti = 1
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=1,\ T_d=1$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
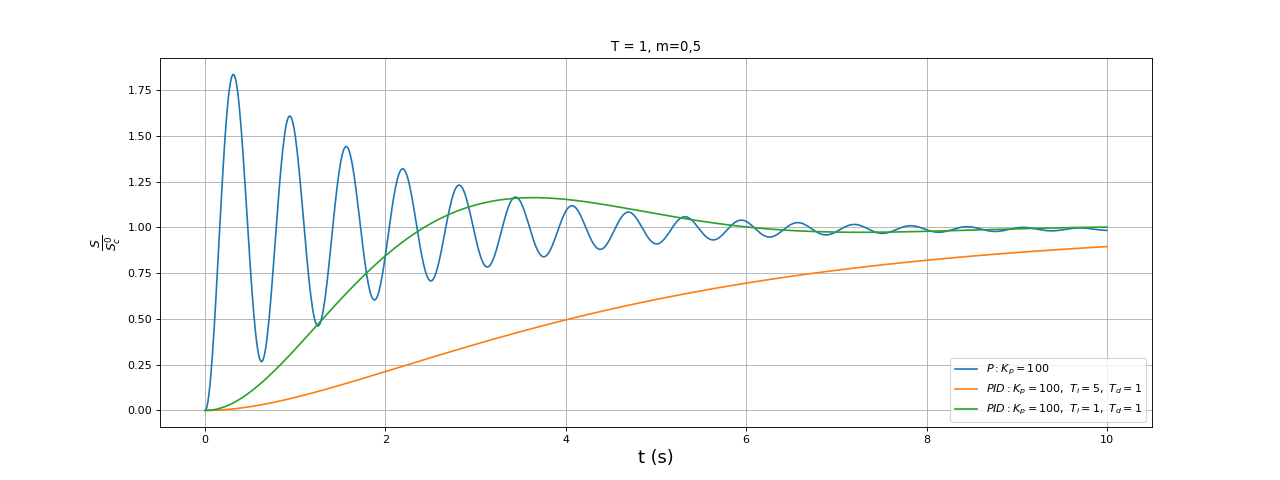 fig9.pdf
fig9.pdf
Lorsque Ti=1, le dérivateur permet d'éliminer les oscillations faiblement amorties mais le dépassement reste. Dans le cas présent, l'intégrateur et le dérivateur permettent d'obtenir une réponse indicielle bien meilleure que le correcteur proportionnel seul : le dépassement est nettement plus faible et le temps de réponse un peu plus faible. On peut tenter de réduire encore Ti et Td :
T = 1 m = 0.5 A0 = 1 Kp = 100 Td = 0.5 Ti_lim = Ti_limite(A0,T,m,Kp,Td)
print(Ti_lim) --> 0.01941370607649
T = 1
m = 0.5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=0,5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Kp = 100
Ti = 0.5
Td = 0.5
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,5,\ T_d=0,5$")
Ti = 0.2
Td = 0.2
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,2,\ T_d=0,2$")
Ti = 0.1
Td = 0.1
t,S = reponsePIDordre2(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,1,\ T_d=0,1$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
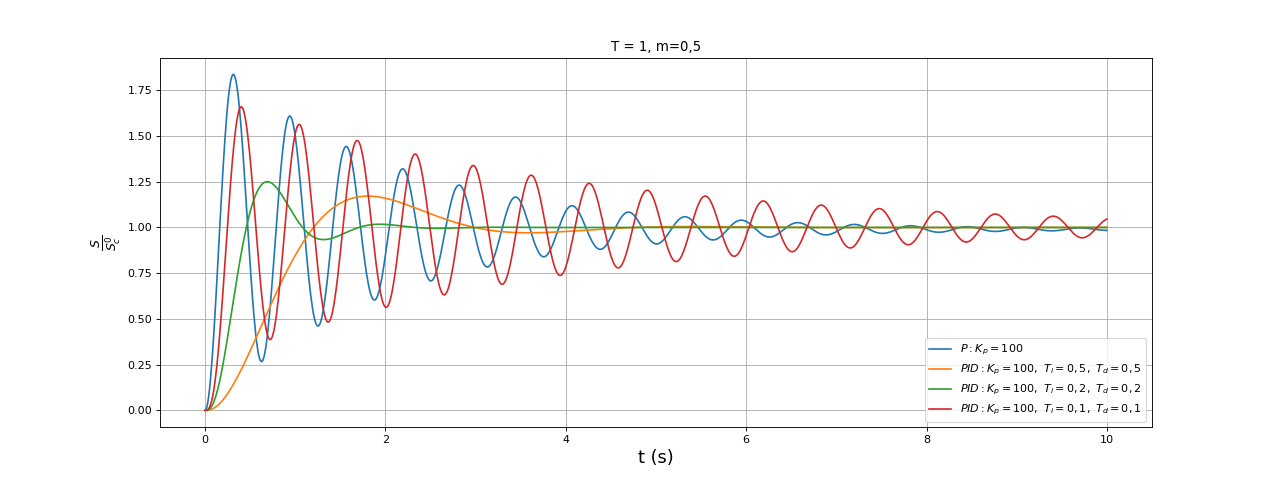 fig10.pdf
fig10.pdf
Pour Ti=Td=0,5, le dépassement est inchangé mais le temps de reponse et nettement réduit. Pour Ti=Td=0,2 le temps de réponse se réduit encore mais le dépassement augmente. Pour Ti=Td=0,5, la réponse se dégrade considérablement, sans doute parce qu'on s'approche de l'instabilité.
Pour conclure, cette simulation montre que le correcteur PID permet d'améliorer grandement la réponse d'un système dont la réponse indicielle sans asservissement est oscillatoire amortie.
3.d. Calcul des pôles
La décomposition de la fonction de transfert (fraction rationnelle) en éléments simples permet d'obtenir ses pôles. La fonction scipy.signal.residue effectue numériquement cette décomposition.
from scipy.signal import residue def decompositionPIDordre2(A0,T,m,Kp,Ti,Td): b = [A0*Kp*Td,A0*Kp,A0*Kp/Ti] a = [T**2,2*m*T+A0*Kp*Td,1+A0*Kp,A0*Kp/Ti] return residue(b,a,tol=1e-4)
Voici un exemple, qui reprend les coefficients de la dernière simulation :
A0 = 1 T = 1 m = 0.5 Kp = 100 Ti = 0.2 Td = 0.2 [r,p,d] = decompositionPIDordre2(A0,T,m,Kp,Ti,Td)
Voici les résidus :
print(r)
--> array([ 0.72929871+0.62424818j, 0.72929871-0.62424818j,
18.54140258+0.j ])
et les pôles :
print(p)
--> array([ -2.12366127+5.03349166j, -2.12366127-5.03349166j,
-16.75267746+0.j ])
La réponse indicielle s'écrit :
Les deux premiers pôles sont conjugués donc les constantes a1 et a2 le sont aussi et la somme des deux premières exponentielles est réelle. Le troisième pôle est réel. Si l'on reprend les conditions initiales nulles adoptées pour la simulation précédente, les trois constantes vérifient le système d'équations linéaire suivant :
Voici la résolution numérique de ce système :
from numpy.linalg import solve A = np.array([[1,1,1],[p[0],p[1],p[2]],[p[0]**2,p[1]**2,p[2]**2]]) B = np.array([-1,0,0]) a = solve(A,B)
print(a)
--> array([-0.4376505+0.39216166j, -0.4376505-0.39216166j,
-0.124699 +0.j ])
Les deux premières constantes sont bien conjugées et la troisième est réelle (à l'erreur d'arrondi près). Voici le tracé de la réponse indicielle :
t = np.linspace(0,10,1000)
S = 1 + np.real(a[0]*np.exp(p[0]*t)+a[1]*np.exp(p[1]*t)+a[2]*np.exp(p[2]*t))
figure(figsize=(16,6))
plot(t,S)
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
grid()
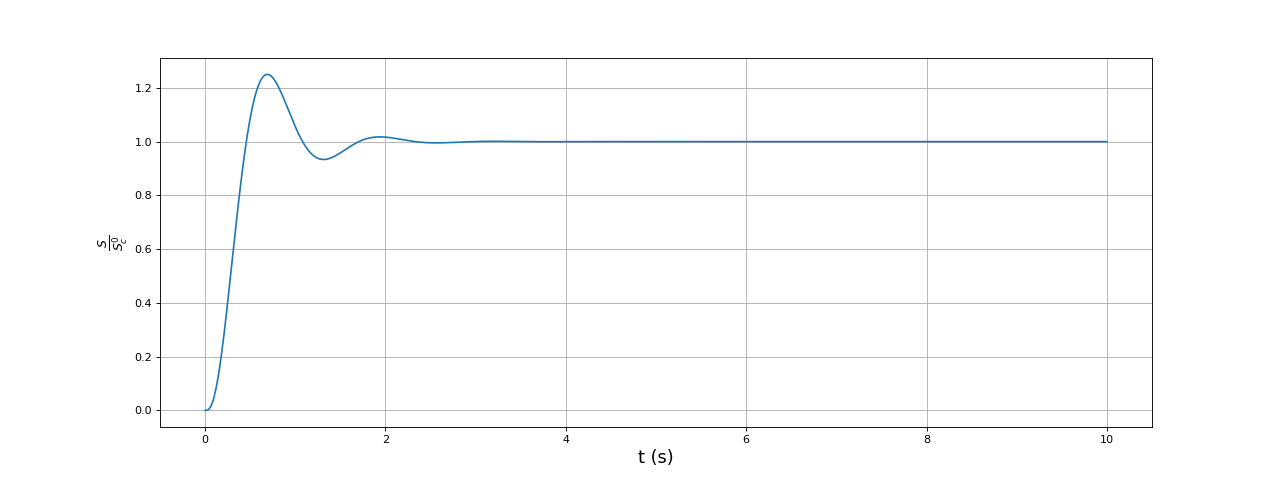 fig11.pdf
fig11.pdf
Voici une fonction qui fait tous les calculs :
def reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N): [r,p,d] = decompositionPIDordre2(A0,T,m,Kp,Ti,Td) A = np.array([[1,1,1],[p[0],p[1],p[2]],[p[0]**2,p[1]**2,p[2]**2]]) B = np.array([-1,0,0]) a = solve(A,B) t = np.linspace(0,tmax,N) S = 1 + np.real(a[0]*np.exp(p[0]*t)+a[1]*np.exp(p[1]*t)+a[2]*np.exp(p[2]*t)) return t,S
L'influence d'un paramètre peut être étudiée en traçant la partie réelle des pôles en fonction de ce paramètre. Voici par exemple l'influence de Td à Kp et Ti fixés :
A0 = 1
T = 1
m = 0.5
Kp = 100
Ti = 0.2
Td = np.linspace(0.01,0.5,30)
figure()
title("Kp=100, Ti = 0,2")
style = ["ro","b+","g."]
for k in range(len(Td)):
[r,p,d] = decompositionPIDordre2(A0,T,m,Kp,Ti,Td[k])
for i in range(3):
plot(Td[k],-np.real(p[i]),style[i])
xlabel(r"$T_d$",fontsize=16)
ylabel("-Re(p)")
grid()
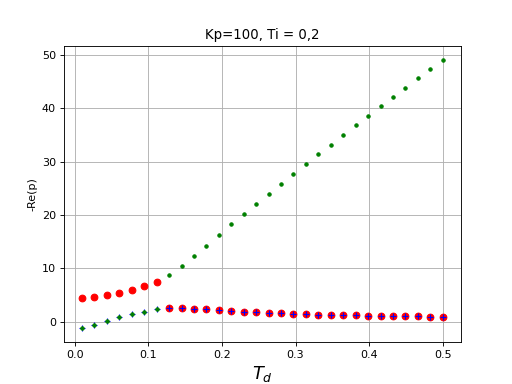 fig12.pdf
fig12.pdf
Après avoir repéré le domaine où toutes les parties réelles sont négatives, on peut utiliser une échelle logarithmique pour l'opposée de la partie réelle :
yscale('log')
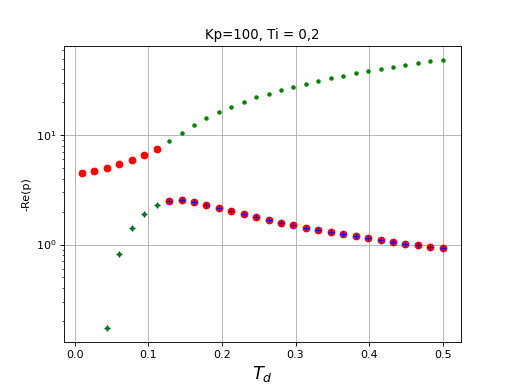 fig13.pdf
fig13.pdf
Le temps de réponse est l'inverse de -Re(p) le plus petit. On a donc intérêt à choisir une valeur de Td qui donne la plus petite valeur de -Re(p) la plus grande. Ici, il s'agit de 0,12. Cependant, la partie réelle ne donne aucune information sur le dépassement. Pour cela, il faut tracer la réponse indicielle pour différentes valeurs de Td proches de la valeur optimale :
T = 1
m = 0.5
A0 = 1
tmax = 10
N = 1000
figure(figsize=(16,6))
title("T = 1, m=0,5")
Kp = 100
t,S = reponsePordre2(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
Ti = 0.2
Td = 0.1
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,2,\ T_d=0,1$")
Ti = 0.2
Td = 0.12
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,2,\ T_d=0,12$")
Ti = 0.2
Td = 0.2
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PID : K_p=100,\ T_i=0,2,\ T_d=0,2$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
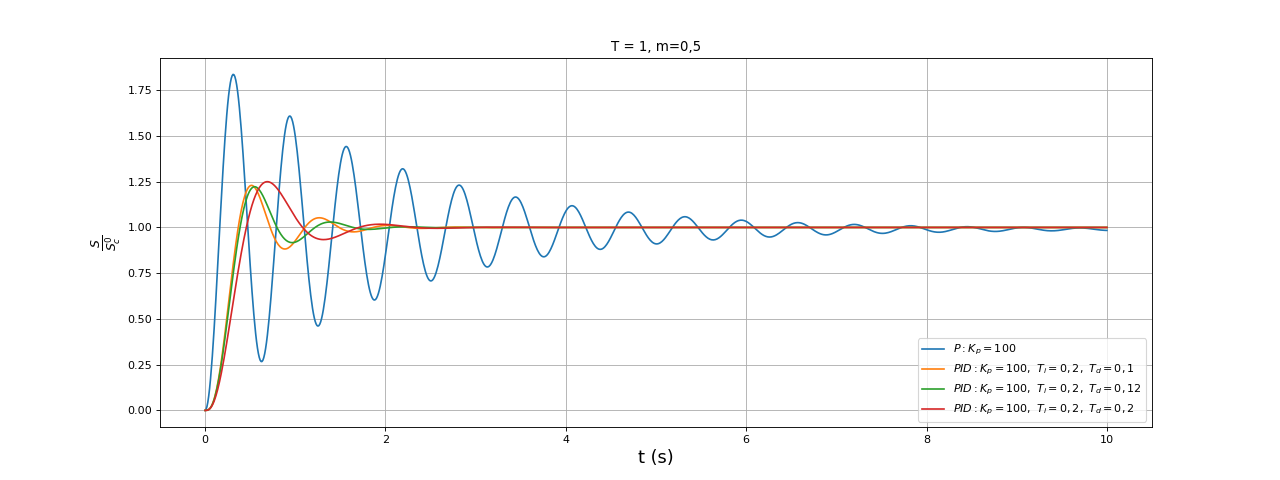 fig14.pdf
fig14.pdf
Finalement, la meilleure réponse est obtenue avec Td=0,1 car son dépassement est un peu plus faible. On remarque que cette valeur de Ti ne fonctionne pas sans le dérivateur puisque le système est instable si Td est inférieur à 0,04 (environ). Conformément à la condition de stabilité , le dérivateur permet d'abaisser la valeur de Ti minimale. Autrement dit, le dérivateur permet de réaliser un intégrateur avec un temps de réponse plus petit.
3.e. Exemple
La fonction suivante calcule les pôles d'un système d'ordre 2 asservi avec un correcteur proportionnel :
def decompositionPordre2(A0,T,m,Kp): b = [A0*Kp] a = [T**2,2*m*T,1+A0*Kp] return residue(b,a,tol=1e-4)
et celle-ci renvoie la réponse indicielle :
def reponsePordre2poles(A0,T,m,Kp,tmax,N): [r,p,d] = decompositionPordre2(A0,T,m,Kp) A = np.array([[1,1],[p[0],p[1]]]) B = np.array([-A0*Kp/(1+A0*Kp),0]) a = solve(A,B) t = np.linspace(0,tmax,N) S = A0*Kp/(1+A0*Kp) + np.real(a[0]*np.exp(p[0]*t)+a[1]*np.exp(p[1]*t)) return t,S
La fonction suivante renvoie la réponse indicielle d'un système d'ordre 2 (sans asservissement) :
def reponseOrdre2poles(A0,T,m,tmax,N): b = [A0] a = [T**2,2*m*T,1] [r,p,d] = residue(b,a,tol=1e-4) A = np.array([[1,1],[p[0],p[1]]]) B = np.array([-1,0]) a = solve(A,B) t = np.linspace(0,tmax,N) S = 1 + np.real(a[0]*np.exp(p[0]*t)+a[1]*np.exp(p[1]*t)) return t,S
Nous cherchons à réaliser un asservissement pour un système supposé d'ordre 2 donc on connaît la réponse indicielle expérimentale. On commence par trouver les paramètres T et m qui permettent de reproduire au mieux cette réponse indicielle :
m=0.5
T = 1e-3
A0 = 1
tmax = 0.05
N = 1000
t,S = reponseOrdre2poles(A0,T,m,tmax,N)
figure(figsize=(16,6))
plot(t,S)
grid()
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{A_0}$",fontsize=16)
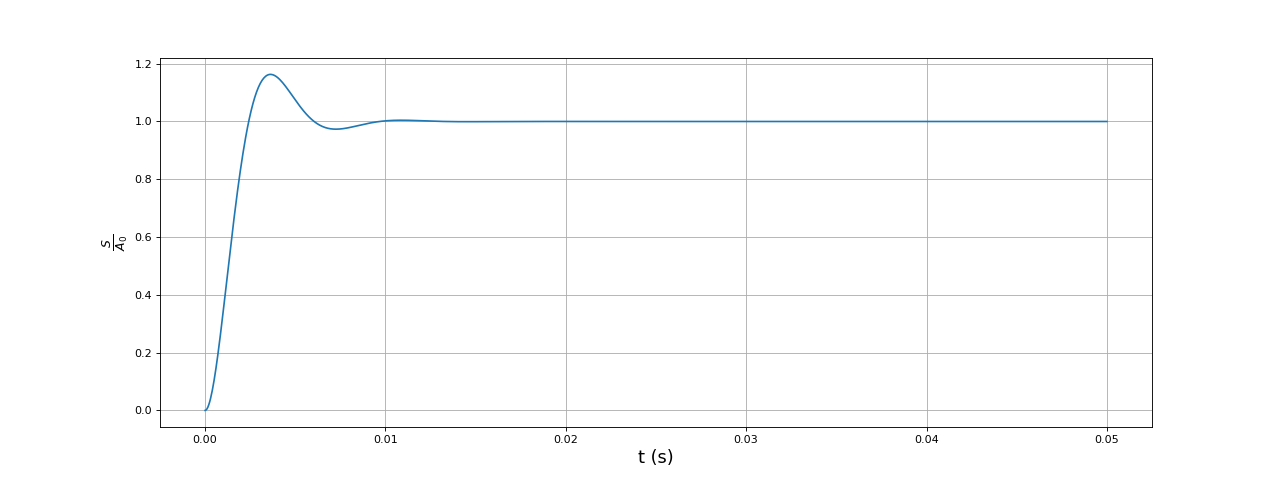 fig15.pdf
fig15.pdf
On commence par étudier le correcteur proportionnel, sachant qu'une valeur de Kp grande est nécessaire pour obtenir une erreur faible :
tmax = 0.05
N = 1000
figure(figsize=(16,6))
title("T = 1e-3, m=0,5")
Kp = 10
t,S = reponsePordre2poles(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=10$")
Kp = 100
t,S = reponsePordre2poles(A0,T,m,Kp,tmax,N)
plot(t,S,label=r"$P : K_p=100$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
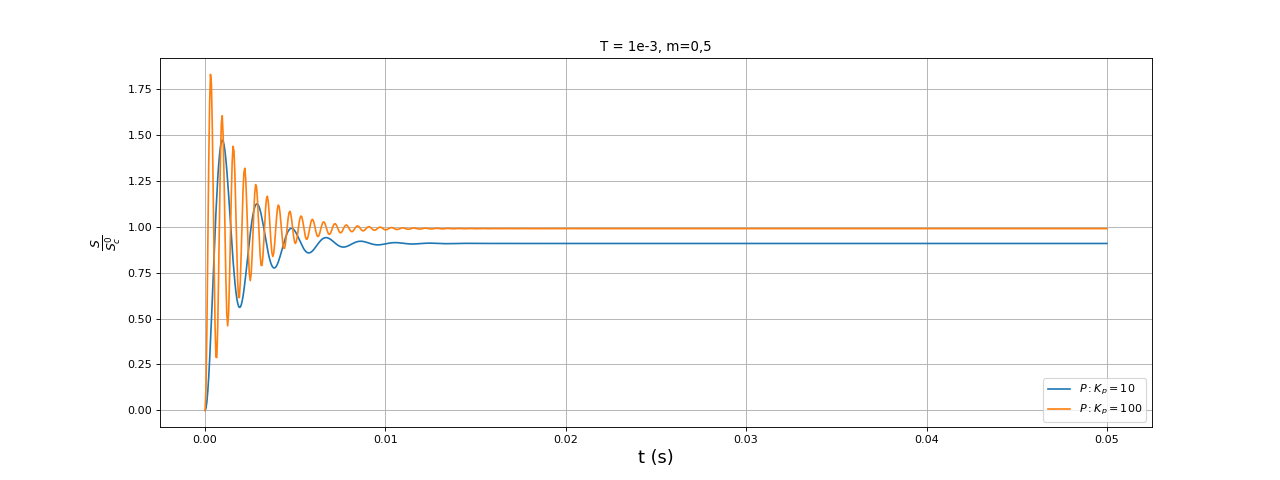 fig16.pdf
fig16.pdf
L'inconvénient majeur du correcteur proportionnel est le fort dépassement de la réponse indicielle. On ajoute l'intégrateur et puisque celui-ci permet d'obtenir une erreur nulle, il est possible de réduire Kp. Il est intéressant de voir l'influence de ce dernier sur le temps Ti limite en dessous duquel le système est instable :
Kp = np.linspace(1,50,100)
Ti_lim = Ti_limite(A0,T,m,Kp,0)
figure(figsize=(12,6))
plot(Kp,Ti_lim)
grid()
xlabel(r"$K_p$",fontsize=16)
ylabel(r"$T_i\ (\rm min)$",fontsize=16)
yscale('log')
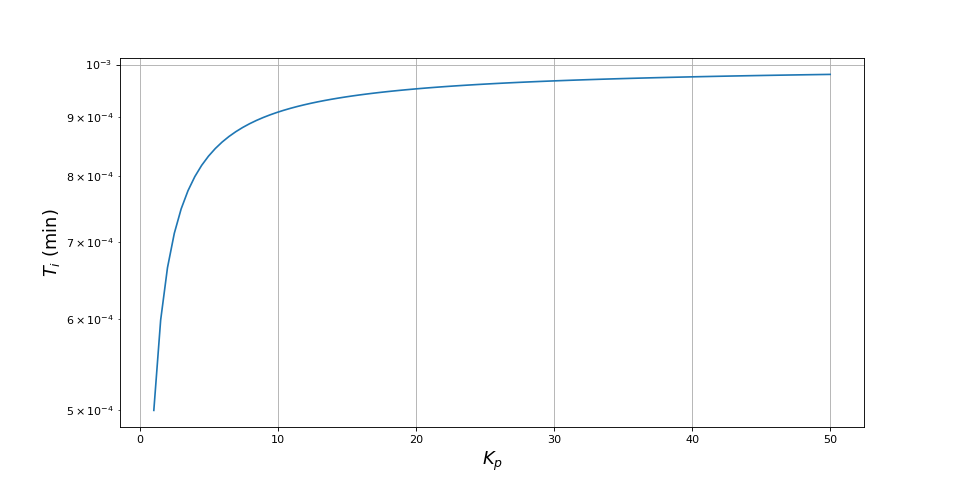 fig17.pdf
fig17.pdf
Abaisser Kp permet d'adopter une valeur de Ti plus faible tout en restant dans le domaine de stabilité.
Pour une valeur de Ti donnée (dans le domaine de stabilité), voyons l'inluence de Kp sur la partie réelle des pôles :
Kp = np.logspace(-1,2,20)
Ti = 1e-3
Td = 0
figure()
title("Ti = 1e-3")
style = ["ro","b+","g."]
for k in range(len(Kp)):
[r,p,d] = decompositionPIDordre2(A0,T,m,Kp[k],Ti,0)
for i in range(3):
plot(Kp[k],-np.real(p[i]),style[i])
xlabel(r"$K_p$")
ylabel("-Re(p)")
yscale('log')
xscale('log')
grid()
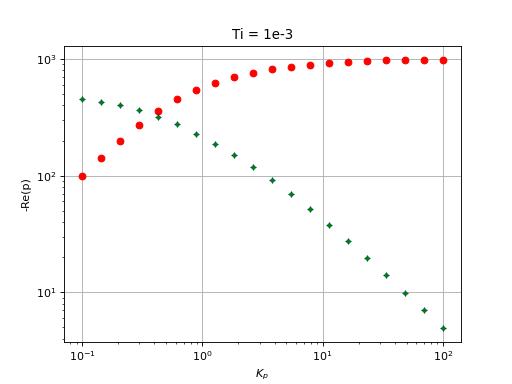 fig18.pdf
fig18.pdf
La valeur optimale de Kp (pour cette valeur de Ti) est celle qui donne le plus petit de -Re(p) le plus grand. Il s'agit de Kp=0,5.
tmax = 0.05
N = 1000
figure(figsize=(16,6))
title("T = 1e-3, m=0,5")
Kp=0.1
Ti=1e-3
Td=0
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=0,1, T_i=1e-3$")
Kp=0.5
Ti=1e-3
Td=0
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=0,5, T_i=1e-3$")
Kp=1
Ti=1e-3
Td=0
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=1, T_i=1e-3$")
Kp=10
Ti=1e-3
Td=0
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=10, T_i=1e-3$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
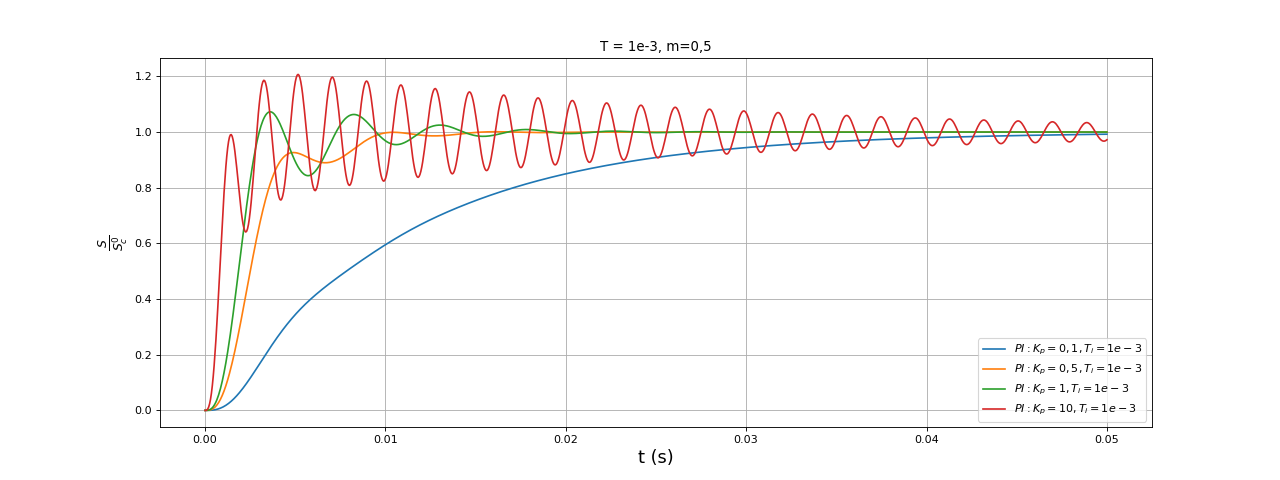 fig19.pdf
fig19.pdf
La valeur Kp=0,5 est effectivement un bon choix : elle donne une réponse un peu plus lente que le correcteur proportionnel mais sans dépassement.
Pour Kp=0,5 et Td=1e-3, on regarde l'influence du dérivateur :
Kp = 0.5
Ti = 1e-3
Td = np.logspace(-4,-2,100)
figure()
title("Kp = 0,5, Ti = 1e-3")
style = ["ro","b+","g."]
for k in range(len(Td)):
[r,p,d] = decompositionPIDordre2(A0,T,m,Kp,Ti,Td[k])
for i in range(3):
plot(Td[k],-np.real(p[i]),style[i])
xlabel(r"$T_d$")
ylabel("-Re(p)")
yscale('log')
xscale('log')
grid()
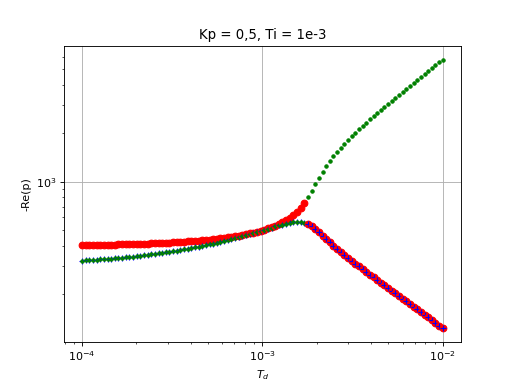 fig20.pdf
fig20.pdf
La valeur optimale de Td est environ 1.8e-3 :
tmax = 0.05
N = 1000
figure(figsize=(16,6))
title("T = 1e-3, m=0,5")
Kp=0.5
Ti=1e-3
Td=1.8e-3
t,S = reponsePIDordre2poles(A0,T,m,Kp,Ti,Td,tmax,N)
plot(t,S,label=r"$PI : K_p=0,5, T_i=1e-3, Td=1,8e-3$")
xlabel("t (s)",fontsize=16)
ylabel(r"$\frac{S}{S_c^0}$",fontsize=16)
legend(loc="lower right")
grid()
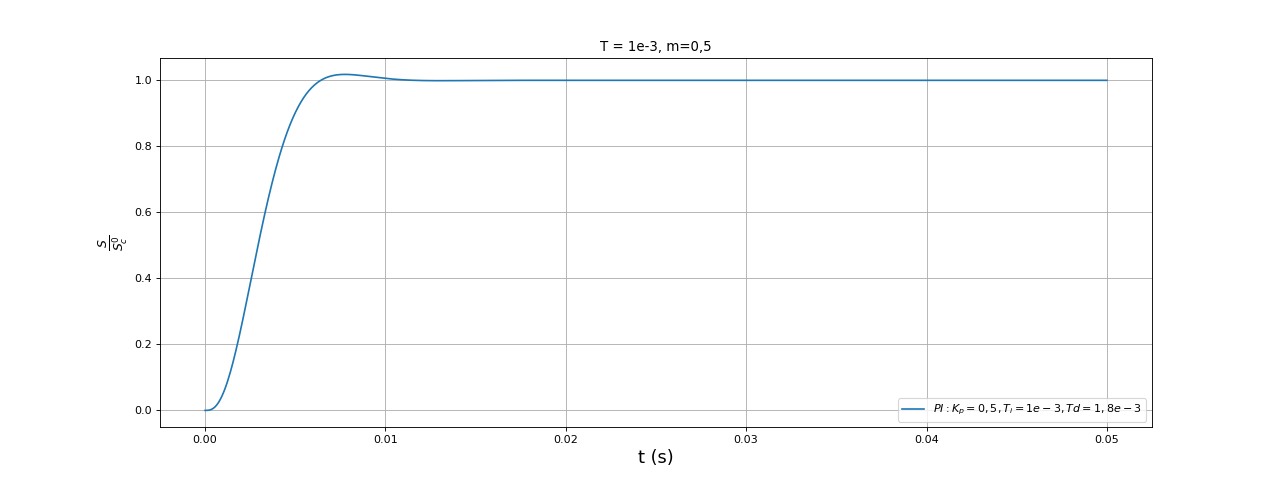 fig21.pdf
fig21.pdf
On obtient une réponse indicielle très statisfaisante. Il ne s'agit peut-être pas de la solution optimale mais cette procédure de réglage avec calcul des pôles donne ici un bon résultat. En effet, le tracé de la partie réelle des pôles en fonction d'un paramètre du correcteur permet de trouver rapidement la valeur optimale de ce paramètre, les deux autres étant fixés.
La procédure d'ajustement mise en œuvre dans cet exemple est la suivante :
- Choisir une valeur de Ti proche du temps de réponse du système non asservi.
- Pour cette valeur, déterminer la valeur optimale de Kp, c'est-à-dire celle qui donne le temps de réponse le plus petit.
- Ajouter le dérivateur et déterminer la valeur optimale de Td (qui est proche de Ti) qui donne le temps de réponse le plus petit.
Il s'agit d'un problème d'optimisation à trois paramètres donc il existe évidemment d'autres manières d'ajuster les paramètres.