Triangulation de Delaunay
3. Algorithme de Bowyer-Watson
3.a. Insertion d'un nœud interne
3.b. Insertion d'un nœud externe
3.d. Accélération de la recherche du premier triangle
4. Triangulation de Delaunay contrainte
4.c. Ajout d'un segment de frontière
4.d. Triangulation d'un polygone
5.a. Subdivision des frontières
1. Introduction
Ce document montre comment générer un maillage triangulaire (pour la méthode des éléments finis) au moyen de la triangulation de Delaunay.
L'objectif est de réaliser une implémentation en Python. Les théorèmes utilisés sont simplement énoncés.
2. Définition
Soit S un ensemble de points du plan. Une triangulation de S est un ensemble de triangles dont les sommets sont les points de S et dont la réunion est l'intérieur de l'enveloppe convexe de S.
On appelle cercle circonscrit d'un triangle l'unique cercle qui contient ses trois sommets.
Par définition, une triangulation de Delaunay possède la propriété suivant : pour tous ses triangles, l'intérieur du cercle circonscrit, c'est-à-dire le disque ouvert circonscrit, ne contient aucun point de S.
Pour un ensemble de points donné, il existe une seule triangulation de Delaunay si et seulement si sur aucun cercle circonscit il n'y a plus de 3 points (les trois sommets du triangle).
Dans ce document, nous appelerons nœuds les sommets des triangles car il s'agit des nœuds du maillage que l'on veut générer.
Un triangle d'une triangulation quelconque est dit Delaunay si son disque ouvert circonscrit ne contient aucun nœud.
Un côté d'un triangle est dit Delaunay s'il a un disque ouvert circonscrit qui ne contient aucun nœud. Un côté est dit localement Delaunay s'il appartient à un seul triangle ou si, les deux triangles auquels il appartient étant T1 et T2, il a un disque ouvert circonscrit qui ne contient aucun nœuds de T1 et T2.
Théorème : une triangulation est Delaunay si et seulement si tous les côtés sont Delaunay; une triangulation est Delaunay si et seulement si tous les côtés sont localement Delaunay.
Soit un triangle constitué des trois nœuds N1,N2,N3, rangés dans le sens direct, c'est-à-dire que . Le centre du cercle circonscrit est l'intersection des médiatrices des segments N1N2 et N1N3. Si C12 désigne le centre du segment N1N2 et C le centre du cercle circonscrit, on a . Il en est de même pour le segment N1N3, ce qui conduit aux deux équations linéaires suivantes pour les coordonnées (xc,yc) du point C :
Le déterminant de ce système est :
Il est nul si et seulement si les trois points sont alignés, une situation qui ne doit pas survenir. Le système se résout sans difficultés au moyen des règles de Cramer.
Le rayon du cercle est bien évidemment la distance entre le centre et un des nœuds.
Le rapport du rayon du cercle circonscrit par la longueur minimale des trois côtés (figure ci-dessous) est relié à l'angle minimal des trois angles :
Figure pleine page{kind=link}
Un maillage triangulaire ne doit pas comporter de triangles dont l'angle minimal est trop petit. Un angle minimal d'au moins 30 degrés est souvent recherché, ce qui correspond à pour tous les triangles. Pour un ensemble de nœuds donné, la triangulation de Delaunay est intéressante car elle maximise l'angle minimal. L'objectif de l'amélioration de la triangulation sera d'ajouter des nœuds afin que l'angle minimale augmente jusqu'à atteindre la valeur visée, par exemple 30 degrés.
Pour savoir si un nœud N(x,y) est à dans le disque ouvert circonscrit d'un triangle, il suffit de comparer sa distance au centre du cercle r avec le rayon R.
Il n'est pas rare que le point testé se trouve théoriquement sur le cercle circonscrit. Considérons par exemple 4 nœuds formant un carré :
Figure pleine page{kind=link}
On voit facilement sur cet exemple qu'il y a deux triangulations de Delaunay pour ces quatre points car ils sont sur un même cercle. Le point N n'est pas à l'intérieur du cercle circonscrit du triangle N1,N2,N3 mais le test r<R peut renvoyer un résultat positif à cause des erreurs d'arrondi. Pour éviter ce problème, on utilise le test suivant pour savoir si le nœud est dans le disque circonscrit :
avec par exemple . De cette manière, on évite qu'un nœud situé sur le disque circonscrit soir déclaré interne au cercle à cause d'une erreur d'arrondi.
La fonction scipy.spatial.Delaunay permet d'obtenir une triangulation de Delaunay d'un ensemble de points.
import numpy as np from matplotlib.pyplot import * from scipy.spatial import Delaunay from scipy.linalg import det from numpy.random import uniform import random import time
Nous définissons une classe Noeud. Chaque nœud est une instance de cette classe. Chaque instance est transmise dans les fonctions et stockée dans les listes sous la forme d'une référence. Par exemple, si l'on écrit L=[n1,n2,n3] où n1,n2,n3 sont trois instances de la classe Noeud, ce sont en fait les références de ces instances qui sont stockées dans la liste. Ainsi n1 désigne un objet similaire au pointeur du langage C/C++. Le test n1==n2 permet de savoir si deux références pointent le même nœud, sans réaliser aucun test sur les coordonnées. Deux nœuds différents qui ont exactement les mêmes coordonnées seront bien traités comme distincts. La classe contient les coordonnées du nœud et la liste des triangles auxquels il appartient.
class Noeud:
def __init__(self,x,y):
self.x = x
self.y = y
self.triangles = []
def draw(self,style):
plot([self.x],[self.y],style)
La classe ListeNoeuds implémente une liste de nœuds ne contenant pas plusieurs nœuds de mêmes coordonnées.
class ListeNoeuds:
def __init__(self):
self.noeuds = []
def append(self,n):
for no in self.noeuds:
if no.x==n.x and no.y==n.y:
return no
self.noeuds.append(n)
return n
La classe Triangle représente un triangle. Les nœuds du triangle sont stockés dans une liste et sont rangés dans le sens direct. Chaque triangle comporte une liste de ses triangles voisins, c'est-à-dire des triangles avec lesquels il a un côté en commun. Voici la première version de cette classe, qui comporte une fonction permettant de tester si un nœud se trouve dans le disque ouvert circonscrit et une fonction qui calcule le centre et le rayon de ce cercle (utilisée pour tracer le cercle) :
class Triangle:
def __init__(self,n1,n2,n3):
self.noeuds = [n1,n2,n3]
self.detT = n2.x*n3.y-n2.x*n1.y-n1.x*n3.y-n2.y*n3.x+n2.y*n1.x+n1.y*n3.x
self.ST = 0.5*abs(self.detT) # aire du triangle
if self.detT<0:
(n2,n3) = (n3,n2)
self.noeuds = [n1,n2,n3]
self.detT = n2.x*n3.y-n2.x*n1.y-n1.x*n3.y-n2.y*n3.x+n2.y*n1.x+n1.y*n3.x
self.voisins = []
self.virtuel = False # voir plus loin
for i in range(3):
self.noeuds[i].triangles.append(self)
if self.detT==0:
print("triangle avec 3 points alignés")
self.xc,self.yc,self.R = self.cercle()
def distance(n1,n2):
return np.sqrt((n2.x-n1.x)**2+(n2.y-n1.y)**2)
self.longueurs = [distance(self.noeuds[0],self.noeuds[1]),distance(self.noeuds[1],self.noeuds[2]),distance(self.noeuds[2],self.noeuds[0])]
self.Lmin = min(self.longueurs[0],self.longueurs[1],self.longueurs[2])
self.rapport = self.R/self.Lmin
self.thetaMin = np.arcsin(1/(2*self.rapport))
self.present = True
def contientCote(self,na,nb):
return (na in self.noeuds) and (nb in self.noeuds)
def coteCommun(self,tr):
# test si un autre triangle comporte un côté commun avec le triangle
return self.contientCote(tr.noeuds[0],tr.noeuds[1]) or self.contientCote(tr.noeuds[0],tr.noeuds[2]) or self.contientCote(tr.noeuds[1],tr.noeuds[2])
def triangleVoisin(self,tr):
# test si un triangle est voisin
if tr==self: return False
return self.coteCommun(tr)
def ajouterVoisin(self,triangle):
self.voisins.append(triangle)
def enleverVoisin(self,triangle):
self.voisins.remove(triangle)
def dansCercle(self,n):
r = np.sqrt((n.x-self.xc)**2+(n.y-self.yc)**2)
return r-self.R < -1e-10
def coteSegment(self,n,nA,nB):
return (nB.x-nA.x)*(n.y-nA.y)-(nB.y-nA.y)*(n.x-nA.x) >= 0
def contientNoeud(self,n):
return self.coteSegment(n,self.noeuds[0],self.noeuds[1]) and self.coteSegment(n,self.noeuds[1],self.noeuds[2]) and self.coteSegment(n,self.noeuds[2],self.noeuds[0])
def cercle(self):
x1 = self.noeuds[0].x
y1 = self.noeuds[0].y
x2 = self.noeuds[1].x
y2 = self.noeuds[1].y
x3 = self.noeuds[2].x
y3 = self.noeuds[2].y
det = (x2-x1)*(y3-y1)-(y2-y1)*(x3-x1)
xc = ((x2*x2-x1*x1+y2*y2-y1*y1)/2*(y3-y1)-(x3*x3-x1*x1+y3*y3-y1*y1)/2*(y2-y1))/det
yc = ((x3*x3-x1*x1+y3*y3-y1*y1)/2*(x2-x1)-(x2*x2-x1*x1+y2*y2-y1*y1)/2*(x3-x1))/det
R = np.sqrt((x1-xc)**2+(y1-yc)**2)
return xc,yc,R
def draw(self,style=None,linewidth=1):
if style==None:
plot([self.noeuds[0].x,self.noeuds[1].x,self.noeuds[2].x,self.noeuds[0].x],[self.noeuds[0].y,self.noeuds[1].y,self.noeuds[2].y,self.noeuds[0].y],linewidth=linewidth)
else:
plot([self.noeuds[0].x,self.noeuds[1].x,self.noeuds[2].x,self.noeuds[0].x],[self.noeuds[0].y,self.noeuds[1].y,self.noeuds[2].y,self.noeuds[0].y],style,linewidth=linewidth)
def drawCercle(self,style):
xc,yc,R = self.cercle()
theta = np.linspace(0,2*np.pi,360)
x = xc+R*np.cos(theta)
y = yc+R*np.sin(theta)
if style!=None:
plot(x,y,style)
else:
plot(x,y)
def print(self):
print("Triangle : ",self)
for n in self.noeuds:
print(n.x,n.y)
La classe Maillage représente le maillage, c'est-à-dire la triangulation. Voici la première version de cette classe :
class Maillage:
def __init__(self):
self.triangles = []
self.retire = []
self.noeuds = []
self.eps = 1e-10
def testNoeud(self,n):
for no in self.noeuds:
if no.x==n.x and no.y==n.y:
return no
return n
def fromList(self,noeuds,simplices):
triangles = []
for t in simplices:
n1 = noeuds[t[0]]
n2 = noeuds[t[1]]
n3 = noeuds[t[2]]
tr = Triangle(n1,n2,n3)
triangles.append(tr)
for i in range(len(triangles)): #recherche des voisins
for j in range(len(triangles)):
if i!=j and triangles[i].triangleVoisin(triangles[j]):
triangles[i].ajouterVoisin(triangles[j])
self.triangles = triangles
for n in noeuds:
self.noeuds.append(n)
def draw(self,style,linewidth=1):
for tr in self.triangles:
tr.draw(style,linewidth)
def drawCercles(self,style):
for tr in self.triangles:
tr.drawCercle(style)
def verifierDelaunay(self):
i = 0
test = True
for tr in self.triangles:
for n in tr.noeuds:
for t in self.triangles:
if t!=tr:
if not(n in t.noeuds) and (n!=None) and t.dansCercle(n) :
test=False
i += 1
if t.virtuel:
t.noeuds[0].draw("ro")
t.noeuds[1].draw("ro")
else:
t.drawCercle("r-")
return i
Le maillage est une liste de triangles, c'est-à-dire une liste d'objets de la classe Triangle. La fonction fromList permet de générer le maillage à partir d'une liste de nœuds et d'une liste de triangles, chacun ayant la forme d'une liste de trois indices. Cette liste sera fournie par la fonction scipy.spatial.Delaunay. On pourra ainsi disposer d'une triangulation de Delaunay déjà faite pour tester les algorithmes. La génération du maillage consiste à placer les triangles dans la liste et à remplir la liste voisins de chaque triangle. D'une manière générale, toute modification du maillage devra s'accompagner d'une mise à jour de cette liste, une opération relativement délicate car chaque voisin doit apparaître une seule fois dans la liste. Par ailleurs, retirer un voisin de la liste de voisins se fait sans difficultés avec la fonction de liste remove, qui prend en argument le nom du voisin, c'est-à-dire en fait une référence de l'objet représentant le triangle voisin. La fonction verifierDelaunay renvoie le nombre de triangles qui ne sont pas Delaunay, qui doit être nul pour une triangulation de Delaunay. Cette fonction permettra de vérifier le bon fonctionnement d'algorithmes qui transforment la triangulation tout en maintenant une triangulation de Delaunay. La liste des nœuds introduits est mémorisée dans self.noeuds. Un nouveau nœud ne doit pas avoir les mêmes coordonnées qu'un nœud déjà présent. Lorsque les coordonnées sont des nombres aléatoires, cette éventualité est très improbable mais ce n'est plus le cas lorsque des nœuds sont placés sur une grille. La fonction testNoeud renvoit soit la référence du nouveau nœud si celui-ci ne coïncide avec aucun nœud déjà présent, soit la référence du nœud déjà présent de mêmes coordonnées.
Voici un exemple :
points = []
noeuds = []
N = 10
x = uniform(-10,10,N)
y = uniform(-10,10,N)
for i in range(N):
points.append([x[i],y[i]])
noeuds.append(Noeud(x[i],y[i]))
points = np.array(points)
tri = Delaunay(points)
figure(figsize=(8,8))
maillage = Maillage()
maillage.fromList(noeuds,tri.simplices)
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
invalid = maillage.verifierDelaunay()
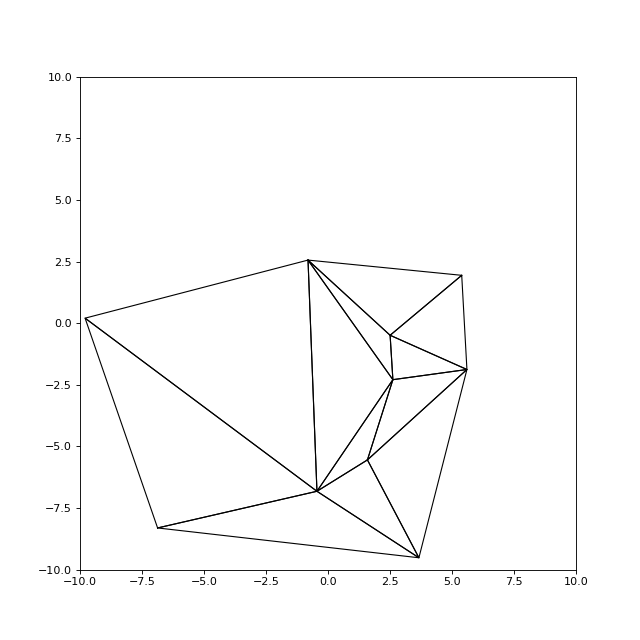 fig1.pdf
fig1.pdf
close()
print(invalid) --> 0
Voici le tracé des cercles circonscrits :
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawCercles(None)
xlim(-10,10)
ylim(-10,10)
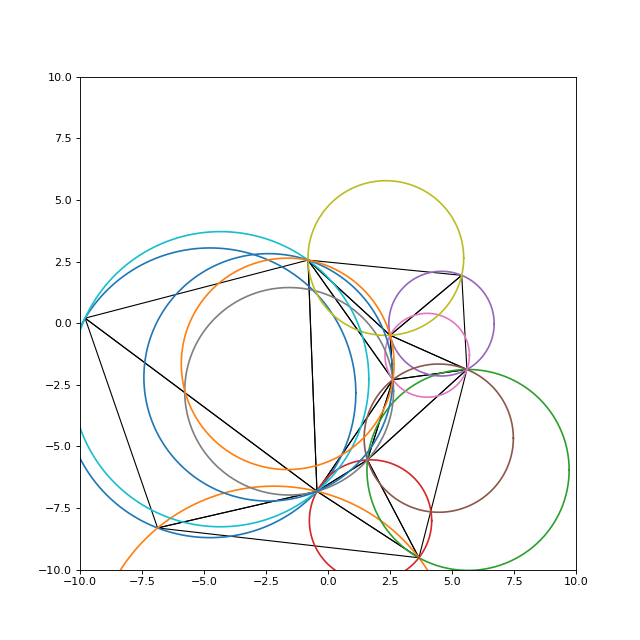 fig2.pdf
fig2.pdf
3. Algorithme de Bowyer-Watson
3.a. Insertion d'un nœud interne
L'algorithme de Bowyer-Watson permet d'ajouter à une triangulation un nouveau nœud et de mettre à jour la triangulation de Delaunay de manière efficace. Dans un premier temps, on traite le cas où le nœud ajouté se trouve dans la triangulation, c'est-à-dire dans l'enveloppe convexe de l'ensemble des nœuds.
Soit N le nouveau nœud. La première étape consiste à repérer un triangle dont le disque ouvert circonscrit contient N. Un tel triangle existe évidemment puisque N se trouve dans l'enveloppe convexe des nœuds.
La deuxième étape consiste à trouver tous les triangles dont le disque ouvert circonscrit contient N. Pour obtenir ces triangles on les recherche tout d'abord parmi les voisins du premier triangle, puis parmi les voisins des voisins et ainsi de suite. La recherche se fait donc de manière récursive.
Les triangles dont le disque ouvert circonscrit contient N forment une cavité polyhédrique, comme illusté sur la figure suivante. Plus précisément, enlever ces triangles donne une cavité polyhédrique.
La troisième étape consiste à générer des nouveaux triangles. Il s'agit des triangles formés du nœud N et des nœuds de la cavité polyhédrique. Ces triangles sont Delaunay. La nouvelle triangulation est donc Delaunay. Pour générer ces triangles, il suffit de repérer le côté des triangles enlevés (les triangles de la cavité) qui ne sont partagés par aucun autre côté des autres triangles enlevés. Ces côtés sont en effet ceux du polyhèdre.
La figure suivante montre une triangulation de Delaunay avec un nœud ajouté N. Les triangles dont le disque ouvert circonscrit contient N sont grisés et leur cercle tracé. Les bords de la partie grisée forment la cavité.
Figure pleine page{kind=link}
La figure suivante montre les nouveaux triangles (grisés) et leur cercle circonscrit, qui effectivement ne contiennent aucuns nœuds.
Figure pleine page{kind=link}
Pour résumer, voici les quatre parties de l'algorithme :
- (1) Recherche d'un triangle dont le disque ouvert circonscrit contient N.
- (2) Recherche récursive de tous les triangles dont le disque ouvert circonscrit contient N. Ces triangles forment une cavité polyhédrique.
- (3) Retrait des triangles de la cavité.
- (4) Génération des triangles constitués de N et des côtés non partagés des triangles de la cavité.
La partie la moins efficace de l'algorithme est (1) car elle se fait a priori en itérant sur tous les nœuds de la triangulation. Il sera donc souhaitable d'accélérer cette étape. Si le nouveau nœud est inséré dans un triangle particulier connu, cette recherche n'est évidemment plus nécessaire. On verra plus loin une méthode d'accélération de cette recherche dans le cas où les nœuds ajoutés sont connus à l'avance.
Nous ajoutons à la classe Maillage la fonction enleverTriangle, qui permet d'enlever un triangle de la liste des triangles, de la listes de voisins des triangles voisins et de la liste des triangles des nœuds sommets de ce triangle. La fonction ajouterNoeud permet d'ajouter un nœud et de mettre à jour la triangulation au moyen de l'algorithme de Bowyer-Watson. Si le nœud que l'on veut ajouter a les mêmes coordonnées qu'un nœud déjà présent, il est ignoré.
class Maillage2(Maillage):
def __init__(self):
Maillage.__init__(self)
def enleverTriangle(self,tr):
if not(tr in self.triangles): return
self.retire.append(tr)
self.triangles.remove(tr)
for trv in tr.voisins:
trv.enleverVoisin(tr)
for i in range(3):
if tr.noeuds[i]!=None:
tr.noeuds[i].triangles.remove(tr)
tr.present = False
def ajouterNoeud(self,n):
for no in self.noeuds:
if no.x==n.x and no.y==n.y:
return 0
self.noeuds.append(n)
def rechercheCavite(n,tr,trCavite):
for t in tr.voisins:
if not(t in trCavite) and t.dansCercle(n):
trCavite.append(t)
rechercheCavite(n,t,trCavite)
trCavite = []
for tr in self.triangles: # recherche d'un triangle dont le cercle circonscrit contient le nouveau noeud
if tr.dansCercle(n):
trCavite.append(tr)
rechercheCavite(n,tr,trCavite) # recherche récursive des autres triangles
break
nouveaux = []
for i in range(len(trCavite)):
tr = trCavite[i]
self.enleverTriangle(tr)
for c in [[0,1],[0,2],[1,2]]: # recherche du côté non partagé
na = tr.noeuds[c[0]]
nb = tr.noeuds[c[1]]
ajout = True
for j in range(len(trCavite)):
if i!=j:
if trCavite[j].contientCote(na,nb):
ajout = False
break
if ajout:
nouvTr = Triangle(n,na,nb)
nouveaux.append(nouvTr)
self.triangles.append(nouvTr)
# recherche des voisins du nouveau triangle parmi les voisins des triangles enlevés
voisins = []
for t in trCavite:
for trv in t.voisins:
if not(trv in trCavite) and not(trv in voisins) and trv.triangleVoisin(nouvTr):
nouvTr.ajouterVoisin(trv)
trv.ajouterVoisin(nouvTr)
voisins.append(trv)
for i in range(len(nouveaux)):
for j in range(len(nouveaux)):
if i!=j and nouveaux[i].triangleVoisin(nouveaux[j]):
nouveaux[i].ajouterVoisin(nouveaux[j])
La recherche des voisins des nouveaux triangles se fait en deux étapes : on recherche tout d'abord les voisins parmi les voisins des triangles enlevés puis parmi les nouveaux triangles. Il est important qu'aucun voisin n'apparaisse plusieurs fois dans une liste de voisins.
Voici un exemple : on génére tout d'abord une triangulation de Delaunay aléatoire avec une enveloppe convexe carrée puis on ajute quelques nœuds de positions aléatoires :
points = []
noeuds = []
N = 10
x = uniform(-10,10,N)
y = uniform(-10,10,N)
for i in range(N):
points.append([x[i],y[i]])
noeuds.append(Noeud(x[i],y[i]))
for x,y in [(-10,-10),(-10,10),(10,10),(10,-10)]:
points.append([x,y])
noeuds.append(Noeud(x,y))
points = np.array(points)
tri = Delaunay(points)
figure(figsize=(8,8))
maillage = Maillage2()
maillage.fromList(noeuds,tri.simplices)
maillage.draw("k-")
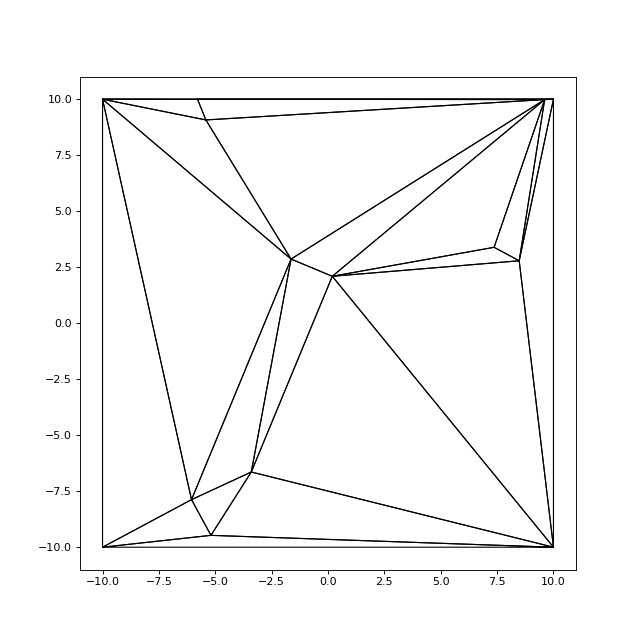 fig3.pdf
fig3.pdf
close()
N = 5
x = uniform(-10,10,N)
y = uniform(-10,10,N)
noeuds = []
for i in range(N):
n = Noeud(x[i],y[i])
maillage.ajouterNoeud(n)
noeuds.append(n)
figure(figsize=(8,8))
maillage.draw("k-")
for n in noeuds:
n.draw("ro")
invalid = maillage.verifierDelaunay()
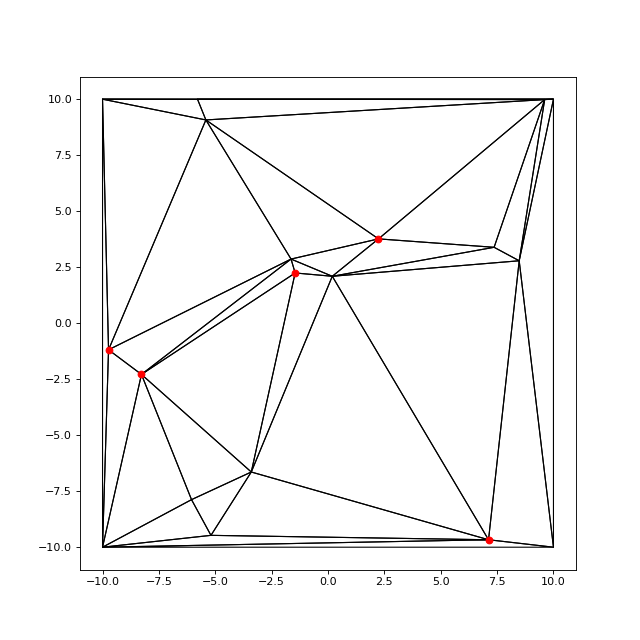 fig4.pdf
fig4.pdf
close()
print(invalid) --> 0
Remarque : si l'on cherche à introduire un nœud dont les coordonnées sont identiques à celles d'un nœud déjà présent, ce nœud n'est dans le disque circonscrit d'aucun triangle donc la triangulation n'est pas modifiée, ce qui est bien le résultat attendu.
3.b. Insertion d'un nœud externe
Un nœud externe ajouté n'est pas dans l'enveloppe convexe de l'ensemble des nœuds déjà présents. Dans ce cas, il s'agit d'ajouter des triangles qui comportent le nœud N ajouté et un segment de la frontière de la triangulation initiale (si le disque ouvert circonscrit du triangle associé à ce segment ne contient pas N). De plus, il faut supprimer les triangles dont le disque ouvert circonscrit contient N.
La figure suivante représente la situation dans le cas où aucun disque ouvert circonscrit ne contient N :
Figure pleine page{kind=link}
Les triangles à ajouter sont tracés en trait pointillé. Pour savoir avec quels segments de la frontière les nouveaux triangles doivent être créés, il suffit de déterminer de quel côté de la droite formé par le segment le nœud N se situe. Par exemple pour le segment N1N2, cette droite est tracée en trait pointillé rouge sur la figure. La droite en trait pointillé bleu est celle d'un segment avec lequel le nœud N ne formera pas un nouveau triangle.
Un nouveau triangle doit être créé si N se trouve à droite de la droite orientée (N1N2). La condition s'écrit :
Si N se trouve sur le segment N1N2 alors il se trouve aussi dans le disque ouvert circonscrit du triangle auquel le segment appartient et ce triangle doit être enlevé (c'est aussi le cas si N est très proche du segment).
Le cas du nœud ajouté externe peut être intégré à l'algoritme de Bowyer-Watson en introduisant des triangles virtuels. À chaque segment de la frontière on associe un triangle virtuel dont le troisième sommet est un nœud virtuel. Ce nœud n'a pas de position particulière, son rôle est de permettre d'intégrer le segment dans un triangle qui sera traité comme tous les triangles par l'algorithme. La condition d'appartenance au disque ouvert circonscrit, qui permet de savoir si un triangle doit être enlevé, est remplacée par la condition . Si cette condition est vérifiée, le triangle virtuel est retiré. Les deux côtés virtuels de ce triangle deviennent des segments de bord s'il ne sont communs avec aucun autre côté de triangles enlevés. Si le nœud N se trouve sur le segment N1N2, il faut enlever le triangle réel auquel ce segment appartient mais aussi le triangle virtuel (car il aura deux segments à la place d'un seul). La condition pour que N appartienne au segment est :
C'est cependant une condition théorique qui a peu de chance de se produire à cause des erreurs d'arrondis. Il est bien plus probable que N se trouve à proximité du segment. La figure suivante montre cette situation après retrait des triangles de la cavité :
Figure pleine page{kind=link}
Dans ce cas, deux triangles sont enlevés, un triangle virtuel et un triangle réel, et quatre sont créés : deux triangles virtuels (associés aux deux nouveaux segments de la frontière) et deux triangles réels (qui remplissent l'espace laissé par le triangle réel enlevé).
Nous devons implémenter une classe pour les triangles virtuels, qui comporte les mêmes fonctions que celle du triangle réel, en particulier la fonction dansCercle mais celle-ci fera le test décrit ci-dessus. On définit donc une nouvelle classe avec la même interface (en C++, il faudrait faire une classe virtuelle de base et deux classes dérivées) :
class TriangleVirtuel(Triangle):
def __init__(self,n1,n2):
self.noeuds = [n1,n2,None] # noeud virtuel = None
self.voisins = []
self.virtuel = True
n1.triangles.append(self)
n2.triangles.append(self)
def dansCercle(self,n):
x1 = self.noeuds[0].x
y1 = self.noeuds[0].y
x2 = self.noeuds[1].x
y2 = self.noeuds[1].y
test = (n.x-x1)*(y2-y1)-(n.y-y1)*(x2-x1)
eps = 1e-10
if test > eps :
return True
surSeg = -eps < test < eps and (x2-x1)*(n.x-x1)+(y2-y1)*(n.y-y1) > 0 and (x1-x2)*(n.x-x2)+(y1-y2)*(n.y-y2) > 0
#print(surSeg,x1,y1,x2,y2,n.x,n.y)
return surSeg
def cercle(self):
return None
def draw(self,style=None,linewidth=1):
if style:
plot([self.noeuds[0].x,self.noeuds[1].x],[self.noeuds[0].y,self.noeuds[1].y],style,linewidth=linewidth)
else:
plot([self.noeuds[0].x,self.noeuds[1].x],[self.noeuds[0].y,self.noeuds[1].y],linewidth=linewidth)
def drawCercle(self,style):
pass
def print(self):
print("Triangle : ",self)
for n in self.noeuds[0:2]:
print(n.x,n.y)
Pour mettre au point la nouvelle version de la classe Maillage, nous lui ajoutons une fonction triangleInitial, qui permet de créer un maillage comportant seulement un triangle réel et trois triangles virtuels, un pour chaque côté.
Bien que l'algorithme soit le même, la fonction ajouterNoeud doit être légèrement modifiée car certains nouveaux triangles sont virtuels. L'algorithme permet de générer automatiquement les triangles virtuels associés aux nouveaux segments de la frontière. La figure suivante représente la situation où 3 segments de la frontière, et seulement 3, ne sont plus sur la frontière après la transformation. Le triangle virtuel associé à un segment de la frontière est représenté sous la forme d'une flèche, le sens de celle-ci indiquant l'ordre des nœuds dans le triangle virtuel (le nœud virtuel est toujours le troisième).
Figure pleine page{kind=link}
Par exemple, le triangle virtuel A est constitué des nœuds N1,N2,V où V désigne le nœud virtuel (représenté par l'objet None). Les triangles virtuels A,B et C sont dans la cavité et sont donc enlevés, indépendamment du fait que le segment correspondant reste ou pas dans la triangulation (il est retiré si le triangle réel auquel il appartient est dans la cavité). Un nouveau triangle est obtenu à partir d'un segment non partagé par d'autres triangles de la cavité auquel on ajoute le nœud N. Dans le cas du triangle virtuel A, les côtés N1V et N1N2 ne sont pas partagés. Il y a donc un nouveau triangle réel N1,N,N2 et un nouveau triangle virtuel N1,N,V (triangle D). Dans le cas du triangle B, les deux côtés N2V et N3V sont partagés respectivement avec les triangles A et C; seul son côté N2N2 n'est pas partagé donc il y a un nouveau triangle réel N2,N,N3 mais aucun triangle virtuel. Dans le cas du triangle C, les côtés non partagés sont N3N4 et N3V donc il y a un nouveau triangle réel N,N4,N3 et un nouveau triangle virtuel N,N4,V. Nous voyons donc que l'algorithme génère bien un triangle virtuel pour chaque nouveau segment de la frontière. Il faut remarquer que le nœud virtuel doit être considéré comm un seul et même nœud pour tous les triangles virtuels, ce qui est facile à obtenir si le nœud virtuel est toujours représenté par l'objet None. Lors de la création d'un triangle virtuel, il faut faire en sorte que ses deux premiers nœuds définissent un segment de la frontière parcouru dans le sens direct. Pour cela, il faut que le nœud du triangle enlevé (autre que V) qui appartient au nouveau triangle garde sa position dans le nouveau triangle, la troisième position étant toujours occupée par V et la position restante par N. Par exemple pour le nouveau triangle D, le premier nœud est N1 puisque ce nœud avait la première position dans le triangle A. Pour le nouveau triangle E, le nœud N4 est en deuxième position puisque c'était sa position dans le triangle C.
class Maillage3(Maillage):
def __init__(self):
Maillage.__init__(self)
def enleverTriangle(self,tr):
if not(tr in self.triangles): return
self.retire.append(tr)
self.triangles.remove(tr)
for trv in tr.voisins:
trv.enleverVoisin(tr)
for i in range(3):
if tr.noeuds[i]!=None:
tr.noeuds[i].triangles.remove(tr)
tr.present = False
def triangleInitial(self,n1,n2,n3):
tr = Triangle(n1,n2,n3)
self.triangles.append(tr)
bord1 = TriangleVirtuel(tr.noeuds[0],tr.noeuds[1])
bord2 = TriangleVirtuel(tr.noeuds[1],tr.noeuds[2])
bord3 = TriangleVirtuel(tr.noeuds[2],tr.noeuds[0])
bords = [bord1,bord2,bord3]
for b in bords:
self.triangles.append(b)
b.ajouterVoisin(tr)
tr.ajouterVoisin(b)
bord1.ajouterVoisin(bord2)
bord2.ajouterVoisin(bord1)
bord1.ajouterVoisin(bord3)
bord3.ajouterVoisin(bord1)
bord2.ajouterVoisin(bord3)
bord3.ajouterVoisin(bord2)
def ajouterNoeud(self,n):
for no in self.noeuds:
if no.x==n.x and no.y==n.y:
return 0
self.noeuds.append(n)
def rechercheCavite(n,tr,trCavite):
for t in tr.voisins:
if not(t in trCavite) and t.dansCercle(n):
trCavite.append(t)
rechercheCavite(n,t,trCavite)
trCavite = []
for tr in self.triangles: # recherche d'un triangle dont le cercle circonscrit contient le nouveau noeud
if tr.dansCercle(n):
trCavite.append(tr)
rechercheCavite(n,tr,trCavite) # recherche récursive des autres triangles
break
nouveaux = []
for i in range(len(trCavite)):
tr = trCavite[i]
self.enleverTriangle(tr)
for c in [[0,1],[0,2],[1,2]]: # recherche du côté non partagé
na = tr.noeuds[c[0]]
nb = tr.noeuds[c[1]]
ajout = True
for j in range(len(trCavite)):
if i!=j:
if trCavite[j].contientCote(na,nb):
ajout = False
break
if ajout:
if nb!=None:
nouvTr = Triangle(n,na,nb)
else :
if tr.noeuds[0]==na:
nouvTr = TriangleVirtuel(na,n)
else:
nouvTr = TriangleVirtuel(n,na)
nouveaux.append(nouvTr)
self.triangles.append(nouvTr)
# recherche des voisins du nouveau triangle parmi les voisins des triangles enlevés
voisins = []
for t in trCavite:
for trv in t.voisins:
if not(trv in trCavite) and not(trv in voisins) and trv.triangleVoisin(nouvTr):
nouvTr.ajouterVoisin(trv)
trv.ajouterVoisin(nouvTr)
voisins.append(trv)
# les nouveaux triangles sont voisins
for i in range(len(nouveaux)):
for j in range(len(nouveaux)):
if i!=j and nouveaux[i].triangleVoisin(nouveaux[j]):
nouveaux[i].ajouterVoisin(nouveaux[j])
return len(nouveaux)
maillage = Maillage3()
n1 = Noeud(-10,-10)
n2 = Noeud(10,-10)
n3 = Noeud(0,10)
maillage.triangleInitial(n1,n2,n3)
maillage.draw("k-")
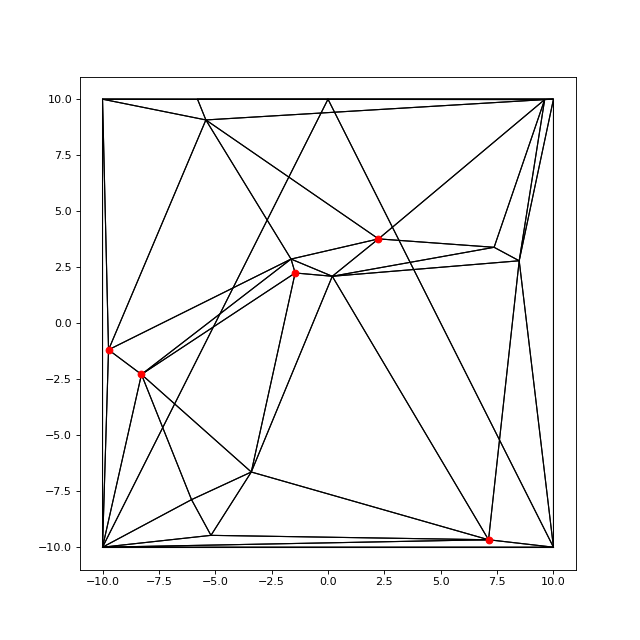 fig5.pdf
fig5.pdf
close()
On commence par ajouter des nœuds à l'intérieur :
figure(figsize=(8,8))
maillage.ajouterNoeud(Noeud(0,0))
maillage.ajouterNoeud(Noeud(1,-5))
maillage.draw("k-")
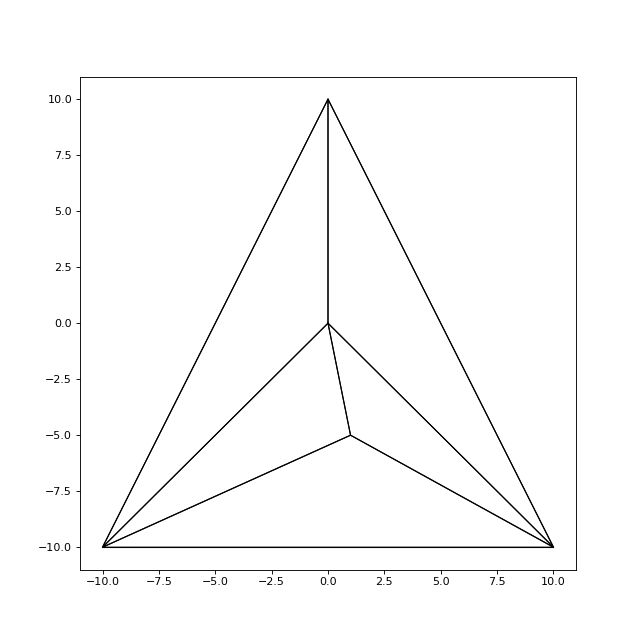 fig6.pdf
fig6.pdf
close()
puis un nœud à l'extérieur :
figure(figsize=(8,8))
maillage.ajouterNoeud(Noeud(5,5))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
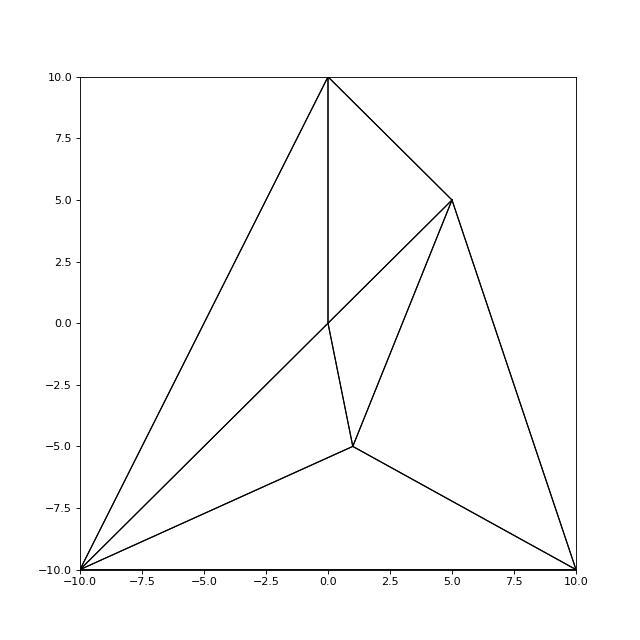 fig7.pdf
fig7.pdf
close()
figure(figsize=(8,8))
maillage.ajouterNoeud(Noeud(9,6))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
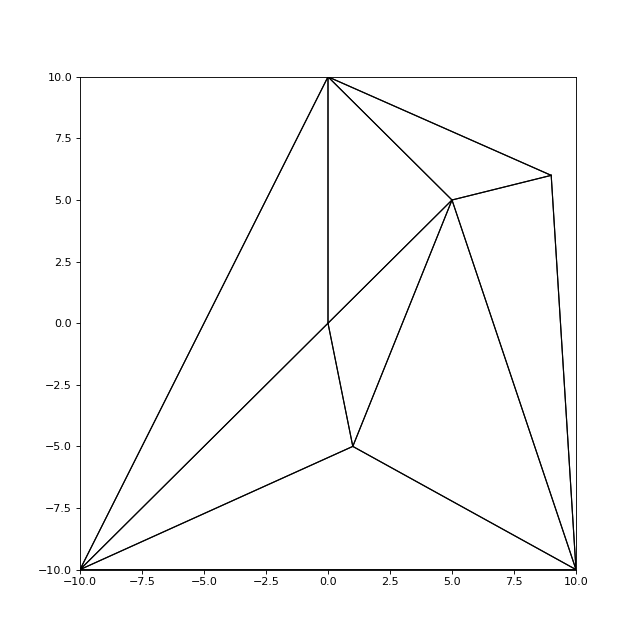 fig8.pdf
fig8.pdf
close()
Pour vérifier que tout fonctionne bien, on ajoute un nœd à l'intérieur d'un des nouveaux triangles :
figure(figsize=(8,8))
maillage.ajouterNoeud(Noeud(5,6))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
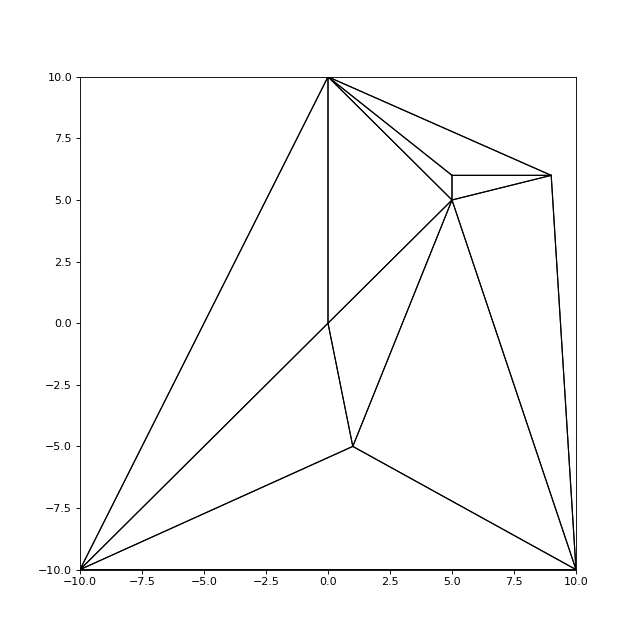 fig9.pdf
fig9.pdf
Un cas particulier à vérifier est celui d'un nouveau nœud situé exactement sur un segment de la frontière. Ajoutons un nœud sur la frontière horizontale (sans erreur d'arrondi possible dans ce cas) :
figure(figsize=(8,8))
maillage.ajouterNoeud(Noeud(-1,-10))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
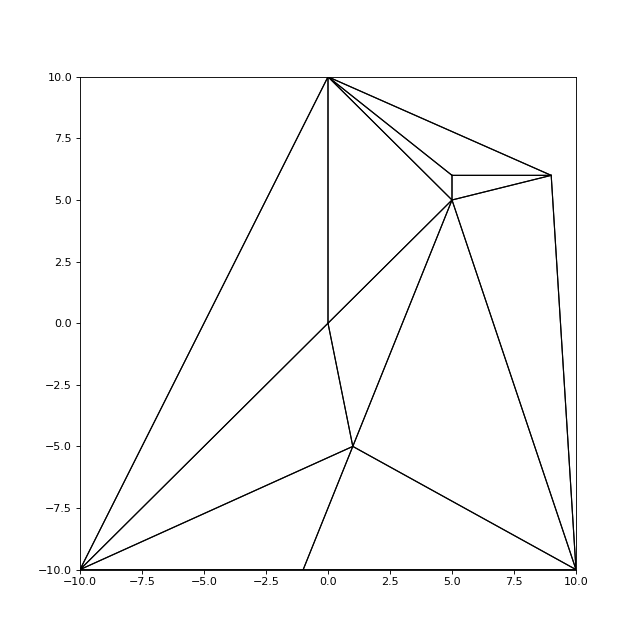 fig10.pdf
fig10.pdf
Finalement, l'algorithme permet de générer une triangulation de Delaunay d'un ensemble de points aléatoires quelconque, à condition de partir d'un triangle initial, qui est évidemment constitué des trois premiers nœuds :
maillage = Maillage3()
n1 = Noeud(-10,-10)
n2 = Noeud(10,-10)
n3 = Noeud(0,10)
maillage.triangleInitial(n1,n2,n3)
N = 10
x = uniform(-10,10,N)
y = uniform(-10,10,N)
noeuds = [n1,n2,n3]
for i in range(N):
n = Noeud(x[i],y[i])
maillage.ajouterNoeud(n)
noeuds.append(n)
figure(figsize=(8,8))
maillage.draw("k-")
for n in noeuds:
n.draw("ro")
invalid = maillage.verifierDelaunay()
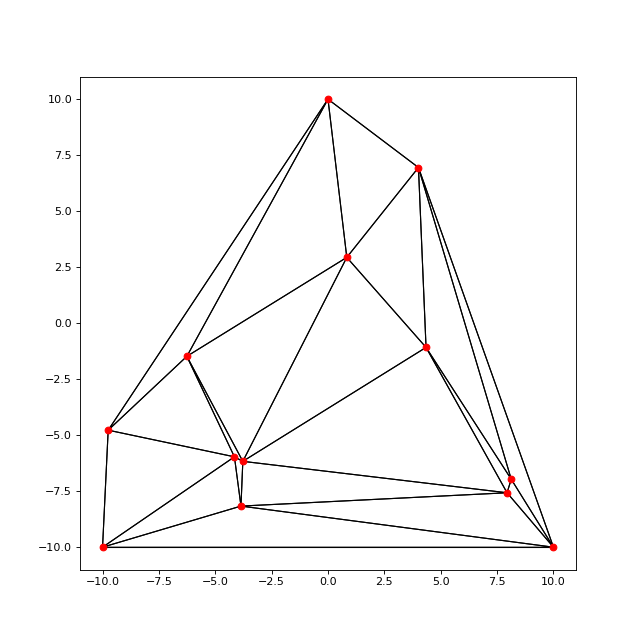 fig11.pdf
fig11.pdf
print(invalid) --> 0
3.c. Insertion aléatoire
L'efficacité de la génération des maillages est une question importante car les maillages pour la méthode des éléments finis peuvent comporter plusieurs centaines de milliers de nœuds.
Outre l'étape de localisation du premier triangle dont le disque ouvert circonscrit contient le nouveau nœud, la destruction et l'ajout de triangles peut être très inefficace lorsque leur nombre est trop grand. Cela se produit pour l'ajout de nœuds externes lorsqu'il sont répartis sur une grille (ou à peu près). Voici un exemple :
N = 20
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage3()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
Voici un état intermédiaire du maillage :
P = 4*N+3
nNouv = 0
for k in range(P):
nNouv += maillage.ajouterNoeud(noeuds[k])
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
nNouv /= P
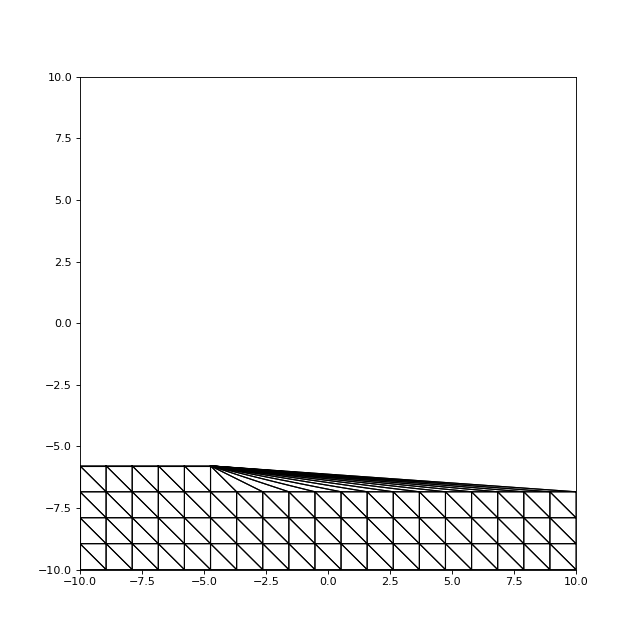 fig12.pdf
fig12.pdf
close()
print(nNouv) --> 10.795180722891565
Le nombre de nouveaux triangles créés à chaque insertion est très grand (le nombre de triangles enlevés est quasiment le même). Dans le cas présent, il est en moyenne égal au nombre de nœuds par rangée divisé par 2.
Une solution simple pour augmenter l'efficacité est d'ajouter les nœuds dans un ordre aléatoire. Bien évidemment, cela n'est possible que pour les nœuds dont les positions sont connues dès le début. Nous ajoutons à la classe Maillage une fonction prenant en argument une liste de nœuds à ajouter et qui les ajoute après avoir effectué des permuations aléatoires (autant que le nombre de nœuds de la liste).
class Maillage4(Maillage3):
def __init__(self):
Maillage3.__init__(self)
def ajouterListeNoeuds(self,noeuds,P):
# P : nombre de noeuds ajoutés
N = len(noeuds)
for p in range(N):
i = random.randint(0,N-1)
j = random.randint(0,N-1)
noeuds[i],noeuds[j] = noeuds[j],noeuds[i]
nNouv = 0
for k in range(P):
nNouv += self.ajouterNoeud(noeuds[k])
return nNouv/P
Voici un état intermédiaire du maillage :
N = 20
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage4()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = 4*N+3
nNouv = maillage.ajouterListeNoeuds(noeuds,P)
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
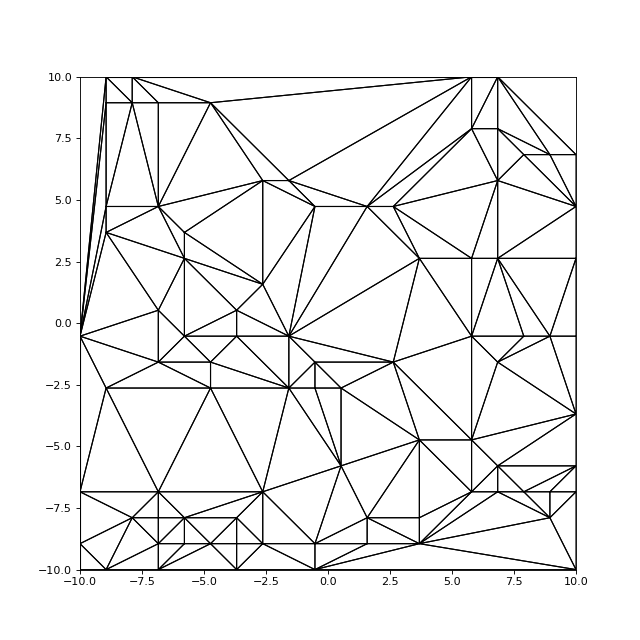 fig13.pdf
fig13.pdf
close()
print(nNouv) --> 5.289156626506024
On comprend aisément l'intérêt de l'ajout aléatoire : la plupart des nœuds ajoutés sont internes.
Voici le maillage complet :
N = 20
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage4()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
nNouv = maillage.ajouterListeNoeuds(noeuds,P)
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
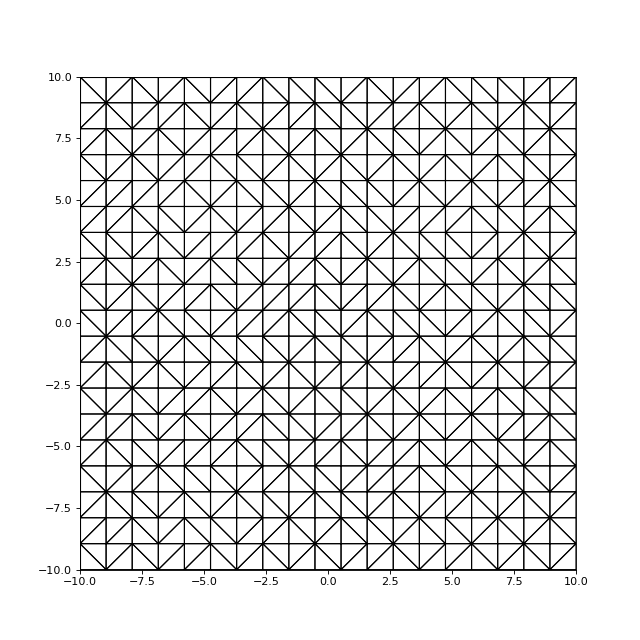 fig14.pdf
fig14.pdf
close()
print(nNouv) --> 4.866498740554156
Le nombre moyen de triangles créés à chaque insertion est réduit. On est ici dans un cas où il existe plusieurs triangulations de Delaunay : les cercles circonscrits des triangles non situés près des bords contiennent en effet 4 nœuds (sur le cercle).
Il peut être montré que si les nœuds sont insérés dans un ordre aléatoire, le nombre moyen de triangles créés à chaque insertion est inférieur à 6. Ainsi, si le nombre de nœuds par rangée est beaucoup plus grand que 12, le gain en efficacité est très important. Voici un exemple avec 40 nœuds par rangée :
N = 40
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage4()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
t1 = time.time()
nNouv = maillage.ajouterListeNoeuds(noeuds,P)
t1 = time.time()-t1
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-10,10)
ylim(-10,10)
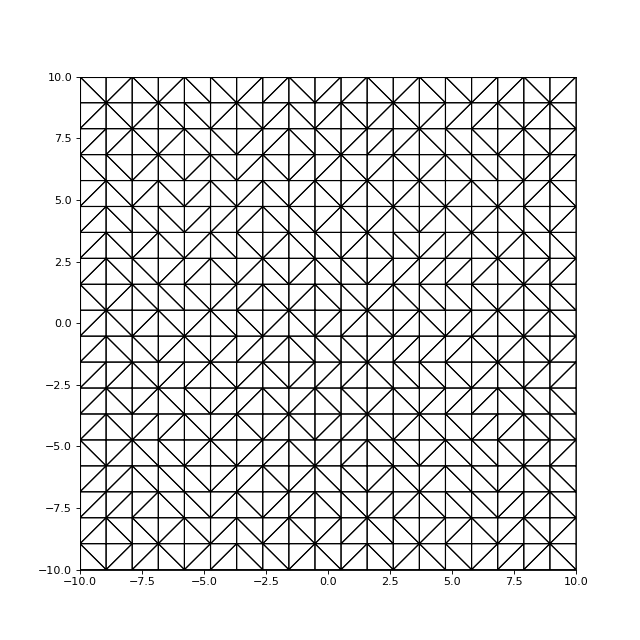 fig15.pdf
fig15.pdf
close()
print(nNouv) --> 5.055103318722605
Cette méthode a cependant un inconvénient : il est plus difficile d'accélérer l'étape de recherche du premier triangle car la position de chaque nœud ajouté est aléatoire. Pour accélérer la première étape, il faut localiser le nœud inséré dans la triangulation, c'est-à-dire déterminer efficacement un triangle dont le cercle circonscrit contient ce nœud. Si on exclut cette étape de localisation (si on la suppose O(1)), la complexité temporelle de l'insertion aléatoire est O(N) où N est le nombres de nœuds insérés. Si l'insertion n'est pas aléatoire, la complexité peut être O(N2) dans le pire des cas (nœuds sur une grille).
3.d. Accélération de la recherche du premier triangle
Lorsqu'un nouveau nœud N est ajouté, il faut tout d'abord trouver un triangle dont le disque ouvert circonscrit contienne N. La recherche par parcours systématique de tous les triangles est très inefficace. L'utilisation d'un graphe de conflits permet d'accélérer cette recherche. Il s'agit d'un graphe biparti qui relie les nœuds non encore ajoutés aux triangles de la triangulation (réels ou virtuels). Chaque nœud non encore ajouté (mais connu à l'avance) est relié à un et un seul triangle, avec lequel il est en conflit, c'est-à-dire que son disque ouvert circonscrit contient le nœud.
Figure pleine page{kind=link}
Un nœud est connecté à un seul triangle mais un triangle peut avoir plusieurs nœuds avec lequel il est en conflit. Par exemple le triangle T2 est en conflit avec les nœuds N1 et N3. Lorsqu'un nœud est ajouté à la triangulation, le graphe des conflits donne immédiatement un triangle dont le disque circonscrit contient ce nœud. Par exemple si le nœud N7 est ajouté, ce triangle est T6.
Le graphe doit être mis à jour après chaque insertion d'un nouveau nœud Ni. La première mise à jour évidente consiste à enlever ce nœud du graphe. Il faut aussi enlever les triangles qui sont supprimés, ceux dont le disque circonscrit contient Ni et qui sont déterminé à partir du premier par recherche récursive par voisinage, comme expliqué plus haut. Enfin il faut ajouter les nouveaux triangles. Enlever un nœud est une opération très simple, consistant à enlever une seule liaison. Enlever un triangle consiste à enlever les liaisons de tous les nœuds avec lesquels ce triangle est en conflit mais cette opération laisse des nœuds sans conflit. Il faut donc attribuer un nouveau triangle à ces nœuds orphelins. Par ailleurs, de nouveaux triangles sont ajoutés au graphe et ces triangles sont des canditats pour les conflits attribués aux nœuds orphelins.
Pour reprendre la figure ci-dessus, supposons qu'on enlève le nœud du graphe N6 (c'est-à-dire que ce nœud est ajouté à la triangulation) et que les triangles enlevés soient T3 (déterminé d'après le graphe), T4 et T6. On suppose par ailleurs que 3 triangles sont ajoutés, les triangles T10,T11,T12. L'état du graphe devient :
Figure pleine page{kind=link}
Il faut ensuite attribuer un triangle à chacun des nœuds N4,N5,N7,N8. Soit Nk l'un de ces nœud. Il était en conflit avec un des triangles de la cavité (qui a été enlevé), de sommets A,B,C. Les points Ni et Nk appartiennent au disque ouvert circonscrit de ce triangle. Considérons la droite NiNk: elle coupe un côté de la cavité polyhédrique, qui est un côté d'un nouveau triangle et aussi un côté non partagé des triangles enlevés. Notons T le nouveau triangle construit à partir de ce côté, colorié en gris sur la figure suivante :
Figure pleine page{kind=link}
Si Nk est à l'intérieur de la cavité, alors il est dans le triangle T, donc dans son disque circonscrit. C'est le cas du point Nk sur la figure ci-dessus (à gauche). Le nœud Nk est donc en conflit avec le triangle T. Si le nœud Nk n'est pas à l'intérieur de la cavité (point Nk' sur la figure à droite), alors ce nœuds est aussi en conflit à avec le triangle T (démonstration ?). Nous voyons donc que, pour chaque nœud qui n'a plus de conflit, il est possible d'en trouver un parmi les triangles ajoutés dans la cavité, ce qui permet de mettre à jours de graphe des conflits.
Un nœud peut avoir un triangle virtuel enregistré comme conflit s'il se trouve à droite du segment de frontière associé à ce triangle (le demi-plan est l'équivalent du cercle circonscrit). Lorsqu'une cavité contient des triangles virtuels (c.-à-d. des bords de la triangulation), il peut arriver qu'un nouveau triangle virtuel soit attribué à un nœud orphelin (qui étaient en conflit avec un triangle de la cavité, réel ou virtuel). La figure suivante montre un exemple où la cavité comporte trois triangles virtuels et un triangle réel :
Figure pleine page{kind=link}
Le cercle circonscrit du triangle réel est tracé en pointillé. Les trois triangles virtuels sont représentés par une flèche bleue. Les nouveaux triangles sont représentés à droite, avec en vert les côtés qui partagent le nœud ajouté Ni. Comme précédemment, Nk est un nœud qui était en conflit avec un triangle (figure de gauche) et, puisque ce triangle est supprimé, il faut lui attribuer un nouveau triangle avec lequel il est en conflit. Prenons l'exemple du nœud Nk représenté sur la figure. Avant suppression des triangles, ce nœud avait peut-être comme triangle associé dans le graphe des conflits le triangle virtuel situé en haut (mais cela peut être un autre triangle). Considérons, pour chaque nœud réel du triangle virtuel, la droite passant par un nœud du segment et par un point quelconque P situé dans la triangulation (le même point pour tous les triangles). Ces droites sont représentées en trait pointillé sur la figure ci-dessus. Elles permettent de partager l'extérieur de la triangulation en domaines, chacun étant associé à un trianle virtuel. Le côté virtuel du triangle est ainsi une demi-droite. Si le nœud Nk est dans le domaine d'un triangle virtuel, celui-ci est en conflit avec lui. Conclusion : si aucun triangle réel créé n'est en conflit avec le nœud Nk alors il existe un nouveau nœud virtuel qui l'est. L'attribution dans le graphe des conflits d'un triangle au nœud Nk consiste donc à en chercher un parmi les nouveaux nœuds. Bien qu'il soit possible d'accélérer cette recherche, nous la ferons par un parcours linéaire des nouveaux triangles car le nombre de ceux-ci est en moyenne inférieur à 6.
Pour implémenter l'algorithme, il n'est pas nécessaire de disposer explicitement d'un graphe biparti. Il suffit que chaque nœud dispose d'une référence d'un triangle avec lequel il est en conflit et que chaque triangle dispose d'une liste de références de nœuds qui sont en conflit avec lui. Voici la nouvelle classe Noeud :
class Noeud:
def __init__(self,x,y):
self.x = x
self.y = y
self.triangleConflit = None
self.triangles = []
def definirConflit(self,tr):
self.triangleConflit = tr
def enleverConflit(self):
self.triangleConflit = None
def draw(self,style):
plot([self.x],[self.y],style)
Voici la nouvelle classe Triangle, dérivée de la première :
class Triangle2(Triangle):
def __init__(self,n1,n2,n3):
Triangle.__init__(self,n1,n2,n3)
self.noeudsConflit = []
def ajouterConflit(self,n):
self.noeudsConflit.append(n)
def enleverConflit(self,n):
self.noeudsConflit.remove(n)
et la nouvelle classe pour les triangles virtuels :
class TriangleVirtuel2(TriangleVirtuel):
def __init__(self,n1,n2):
TriangleVirtuel.__init__(self,n1,n2)
self.noeudsConflit = []
def ajouterConflit(self,n):
self.noeudsConflit.append(n)
def enleverConflit(self,n):
self.noeudsConflit.remove(n)
La classe Maillage3 doit être revue entièrement. Dans la fonction ajouterListNoeuds, il faut initialiser le graphe des conflits (cette fonction est appelée après que le premier triangle réel soit créé, avec trois triangles virtuels). Dans la fonction ajouterNoeud, la recherche des triangles en conflit avec le nœud ajouté est beaucoup plus rapide que précédemment puisque le premier triangle en conflit est mémorisé dans le graphe des conflits, c'est-à-dire dans l'object Noeud. les autres triangles sont trouvés par recherche récursive comme précédemment. Une liste de nœuds en conflit avec les triangles de la cavité, qui sont enlevé, est établie (noeudsSansConflit). La création des nouveaux triangles se fait comme précédemment mais, dès qu'un triangle est créé, on parcours la liste noeudsSansConflit pour attribuer éventuellement ce triangle à un des nœuds de cette liste, à condition que l'attribution n'ait pas déjà été faite. Le nombre de triangles créés est en moyenne inférieur à 6 donc cette mise à jour du graphe des conflits se fait en temps constant.
Nous ajoutons aussi une fonction qui permet d'extraire les nœuds du bord à partir des triangles virtuels, ordonnés dans le sens direct.
class Maillage5(Maillage):
def __init__(self):
Maillage.__init__(self)
def enleverTriangle(self,tr):
if not(tr in self.triangles): return
self.retire.append(tr)
self.triangles.remove(tr)
for trv in tr.voisins:
trv.enleverVoisin(tr)
for i in range(3):
if tr.noeuds[i]!=None:
tr.noeuds[i].triangles.remove(tr)
tr.present = False
def triangleInitial(self,n1,n2,n3):
tr = Triangle2(n1,n2,n3)
self.triangles.append(tr)
bord1 = TriangleVirtuel2(tr.noeuds[0],tr.noeuds[1])
bord2 = TriangleVirtuel2(tr.noeuds[1],tr.noeuds[2])
bord3 = TriangleVirtuel2(tr.noeuds[2],tr.noeuds[0])
bords = [bord1,bord2,bord3]
for b in bords:
self.triangles.append(b)
b.ajouterVoisin(tr)
tr.ajouterVoisin(b)
bord1.ajouterVoisin(bord2)
bord2.ajouterVoisin(bord1)
bord1.ajouterVoisin(bord3)
bord3.ajouterVoisin(bord1)
bord2.ajouterVoisin(bord3)
bord3.ajouterVoisin(bord2)
self.P = Noeud((n1.x+n2.x+n3.x)/3,(n1.y+n2.y+n3.y)/3)
def ajouterListeNoeuds(self,noeuds,P):
# P : nombre de noeuds ajoutés
for n in noeuds: #initialisation du graphe des conflits avec les 4 premiers triangles
for i in range(4):
if self.triangles[i].dansCercle(n):
n.definirConflit(self.triangles[i])
self.triangles[i].ajouterConflit(n)
break
N = len(noeuds)
for p in range(N):
i = random.randint(0,N-1)
j = random.randint(0,N-1)
noeuds[i],noeuds[j] = noeuds[j],noeuds[i]
nNouv = 0
for k in range(P):
nNouv += self.ajouterNoeud(noeuds[k])
return nNouv/P
def printConflits(self):
for i in range(len(self.noeuds)):
print("noeud ",i," conflit :")
self.noeuds[i].triangleConflit.print()
for i in range(len(self.triangles)):
print("triangle ",i)
for n in self.triangles[i].noeudsConflit:
print("noeud : ",n.x,n.y)
def rechercheTrianglesConflit(self,n,trConflit=None):
def rechercheCavite(n,tr,trCavite):
for t in tr.voisins:
if not(t in trCavite) and t.dansCercle(n):
trCavite.append(t)
rechercheCavite(n,t,trCavite)
trCavite = []
if trConflit:
tr = trConflit
else:
tr = n.triangleConflit
trCavite.append(tr)
rechercheCavite(n,tr,trCavite) # recherche récursive des autres triangles
return trCavite
def ajouterNoeud(self,n,trConflit=None):
# trConflit : triangle dont le cercle circonscrit contient le noeud n
# (pour le cas où le noeud n'est pas dans le graphe des conflits)
for no in self.noeuds:
if no.x==n.x and no.y==n.y:
return 0
self.noeuds.append(n)
trCavite = self.rechercheTrianglesConflit(n,trConflit)
if len(trCavite)==0: return 0
nouveaux = []
# mise à jour du graphe des conflits
noeudsSansConflit = [] # noeuds n'ayant plus de triangle associé dans le graphe des conflits
for tr in trCavite:
for no in tr.noeudsConflit:
if no!=n:
noeudsSansConflit.append(no)
no.enleverConflit()
for i in range(len(trCavite)):
tr = trCavite[i]
self.enleverTriangle(tr)
for c in [[0,1],[0,2],[1,2]]: # recherche du côté non partagé
na = tr.noeuds[c[0]]
nb = tr.noeuds[c[1]]
ajout = True
for j in range(len(trCavite)):
if i!=j:
if trCavite[j].contientCote(na,nb):
ajout = False
break
if ajout:
if nb!=None:
nouvTr = Triangle2(n,na,nb)
else :
if tr.noeuds[0]==na:
nouvTr = TriangleVirtuel2(na,n)
else:
nouvTr = TriangleVirtuel2(n,na)
nouveaux.append(nouvTr)
self.triangles.append(nouvTr)
# recherche d'un triangle en conflit pour chaque noeud qui n'en a plus
# nouvTr est-il en conflit avec l'un de ces noeuds ?
for nsc in noeudsSansConflit:
if nouvTr.virtuel==False:
if nsc.triangleConflit==None and nouvTr.dansCercle(nsc):
nsc.definirConflit(nouvTr)
nouvTr.ajouterConflit(nsc)
else:
if nsc.triangleConflit==None and nouvTr.dansCercle(nsc) :
nsc.definirConflit(nouvTr)
nouvTr.ajouterConflit(nsc)
# recherche des voisins du nouveau triangle parmi les voisins des triangles enlevés
voisins = []
for t in trCavite:
for trv in t.voisins:
if not(trv in trCavite) and not(trv in voisins) and trv.triangleVoisin(nouvTr):
nouvTr.ajouterVoisin(trv)
trv.ajouterVoisin(nouvTr)
voisins.append(trv)
for i in range(len(nouveaux)):
for j in range(len(nouveaux)):
if i!=j and nouveaux[i].triangleVoisin(nouveaux[j]):
nouveaux[i].ajouterVoisin(nouveaux[j])
self.nouvTr = nouveaux
return len(nouveaux)
def polyedreBord(self):
virtuels = []
for tr in self.triangles:
if tr.virtuel:
triangle = tr
break
polyedre = []
n1 = triangle.noeuds[0]
premier = n1
n2 = triangle.noeuds[1]
polyedre.append(n1)
recherche = True
while recherche:
for tr in triangle.voisins:
if tr.virtuel and tr.noeuds[0]==n2:
triangle = tr
n1 = tr.noeuds[0]
n2 = tr.noeuds[1]
polyedre.append(n1)
break
if n2==premier:
recherche = False
return polyedre
N = 40
x = np.linspace(0,10,N)
y = np.linspace(0,10,N)
maillage = Maillage5()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
figure(figsize=(8,8))
t2 = time.time()
nNouv = maillage.ajouterListeNoeuds(noeuds,P)
t2 = time.time()-t2
maillage.draw("k-")
xlim(-1,11)
ylim(-1,11)
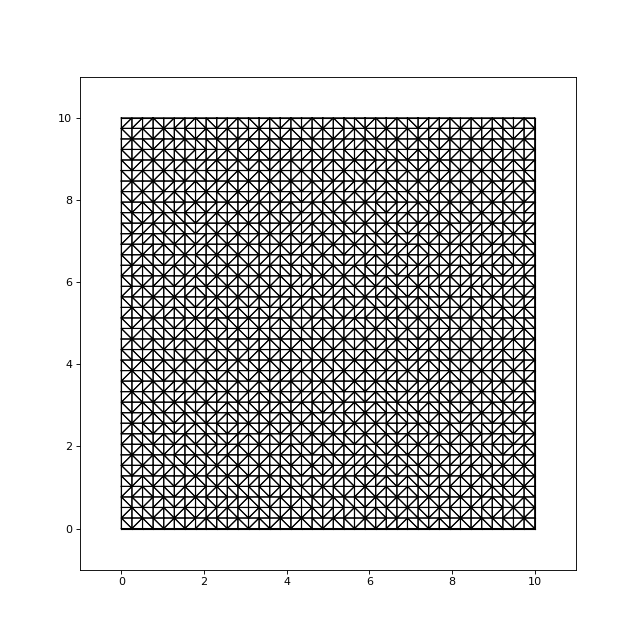 fig16.pdf
fig16.pdf
print(nNouv) --> 5.038196618659987
Voici les temps de calcul sans l'accélération de la recherche du premier triangle et avec :
print(t1) --> 0.958592414855957
print(t2) --> 0.2756493091583252
Voici la génération d'une triangulation avec deux fois plus de nœuds que ci-dessus :
N = int(N*np.sqrt(2))
x = np.linspace(0,10,N)
y = np.linspace(0,10,N)
maillage = Maillage5()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
figure(figsize=(8,8))
t3 = time.time()
nNouv = maillage.ajouterListeNoeuds(noeuds,P)
t3 = time.time()-t3
maillage.draw("k-")
xlim(-1,11)
ylim(-1,11)
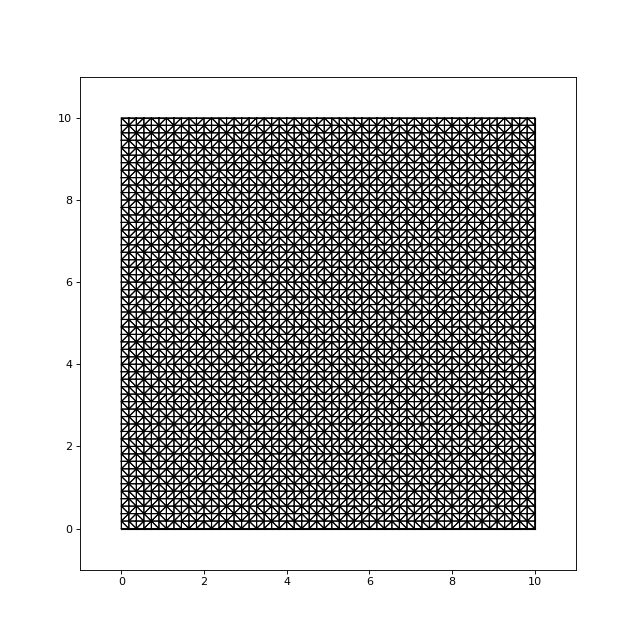 fig17.pdf
fig17.pdf
close()
print(t3) --> 0.7174167633056641
3.e. Retrait d'un nœud
Lorsque le maillage n'est pas satisfaisant, on peut être amené à supprimer un nœud. Cette suppression a pour conséquence immédiate la suppression de tous les triangles qui ont ce nœud comme sommet. Ceux-ci sont immédiatement disponibles car il sont stockés dans une liste associée à chaque nœud. La suppression de ces triangles conduit à une cavité polyhédrique (pas nécessairement convexe) définie par les nœuds des triangles enlevés autres que le nœud enlevé. Ces nœuds sont rangés afin que le polyhèdre soit parcouru dans le sens direct. La figure suivante représente le nœud N à enlever et les triangles auxquels il appartient, qu'il faut aussi enlever.
Figure pleine page{kind=link}
On part du premier triangle rencontré dans la liste des triangles du nœud N, le triangle T1 sur la figure. Dans ce triangle, on considère le nœud N1 qui suit N et le nœud suivant N2. Les nœuds N1 et N2 constituent les deux premiers nœuds du polyèdre. Parmis les triangles auxquels N appartient, on recherche celui qui contient N2, le triangle T2, dans lequel on trouve le nœud N3. La recherche est ainsi répété itérativement jusqu'à obtenir à nouveau le nœud N1. On obtient ainsi la liste des nœuds du polyèdre rangés dans le sens direct. Si le nœud N se trouve sur la frontière de la triangulation, il y a exactement deux triangles virtuels auxquels ce nœud appartient (figure ci-dessus à droite). Lorsqu'on parvient à un triangle virtuel (T4), qui correspond à un segment de bord, on identifie l'indice dans le triangle virtuel du nœuds de ce segment autre que N (nœud N3). Si cet indice vaut 0, comme c'est le cas pour T4 alors le triangle suivant est l'autre triangle virtuel (triangle T5) de la liste des triangles auxquels N appartient. Pour le triangle T5, cet indice vaut 1 donc le triangle suivant est un triangle réel contenant le nœud N4.
Il faut ensuite triangulariser la cavité avec l'algorithme de Bowyer-Watson en traitant les nœuds du polyhèdre comme des nouveaux nœuds, bien qu'ils ne soient pas globalement nouveaux puisqu'ils appartiennent à d'autres triangles (éventuellement à des triangles virtuels). Les trois premiers nœuds du polyèdre définissent le premier triangle (à condition qu'ils ne soient pas alignés).
La triangulation par l'algorithme de Bowyer-Watson, à partir de ce premier triangle et par ajout des nœuds restant du polyèdre, permet d'obtenir une triangulation de Delaunay de la cavité. Cependant, la triangulation obtenue est convexe alors que la cavité ne l'est pas toujours. Cette situation est illustée sur la figure suivante, dans le cas où aucun nœud de la cavité n'est sur un bord de la triangulation :
Figure pleine page{kind=link}
Les deux nouveaux triangles coloriés en rouge doivent être éliminés. Il s'agit de triangles qui ont une intersection avec au moins un des triangles de la triangulation après retrait de ceux de la cavité, ou bien de triangles identiques à un de ces triangles. Il faut détecter efficacement ces triangles. Deux triangles ont une intersection si et seulement si un côté de l'un coupe un côté de l'autre (voir annexe). Pour chaque nouveau triangle, il faut faire ce test avec les triangles auxquels les nœud du triangle appartiennent (qui sont mémorisés dans les nœuds). Par ailleurs, les triangles virtuels générés lors de la triangulation de la cavité, représentés par une flèche rouge dur la figure, doivent aussi être élminés (on verra plus loin qu'on les élimine même s'ils sont au bord).
Il faut aussi considérer le cas où le nœud enlevé se trouve sur la frontière :
Figure pleine page{kind=link}
L'intérieur de la triangulation se trouve à droite. Les triangles enlevés sont représentés en trait pointillé. Les triangles virtuels qui définissaient les bords sont aussi enlevé puisque le nœud enlevé en fait partie. Le polyèdre définissant la cavité contient donc les nœuds 1,2,3 et 4. Les nouveaux triangles apparaissant lors de la triangulation de la cavité sont, par exemple, les triangles 1,2,3 et 2,4,3. Le premier, tracé en bleu, doit être conservé. Le second, tracé en rouge, doit être éliminé. On a aussi représenté les nouveaux triangles virtuels qui doivent être éliminés en rouge et ceux qui doivent être conservés en bleu.
Nous ne voyons pas de méthode simple pour décider si un triangle virtuel doit être gardé ou pas. De plus, ces triangles virtuels ne sont pas toujours orientés convenablement. La stratégie la plus simple est donc de supprimer tous les triangles virtuels générés par la triangulation de la cavité puis de générer des triangles virtuels pour les bords. Lors du retrait des triangles, il faut aussi retirer les virtuels associés aux côtés de bord de ces triangles puisque ceux-ci sont regénérés..
Le premier triangle est similaire au premier triangle introduit précédemment pour l'algorithme de Bowyer-Watson, avec un triangle virtuel associé à chacun de ses trois côtés. Il reste à introduire les autres nœuds (nombre de nœuds du polyèdre moins 3) en suivant l'algorithme exposé ci-dessus et implémenté dans la classe Maillage5. La cavité est donc triangularisé indépendamment du reste de la triangulation. Lorsqu'un nœud du polyèdre est ajouté, il n'appartient évidemment à aucun disque circonscrit des triangles situés hors de la cavité. Grace à l'algorithme de Bowyer-Watson, il n'appartient à aucun disque circonscrit des nouveaux triangles. De plus, aucun nœud à l'extérieur de la cavité n'est dans le disque ouvert circonscrit d'un des nouveaux triangles (démonstration ?). En conséquence, la triangulation de la cavité conduit bien à une triangulation globalement Delaunay.
L'implémentation de la triangulation de la cavité est immédiate : il suffit de créer une instance de la classe Maillage5 et de l'utiliser pour générer les triangles, à la suite de quoi ceux-ci sont récupérés et insérés dans la triangulation globale s'ils sont valides. Il faut faire attention au fait que les nœuds du polyèdre sont modifiés par la triangulation de la cavité : il faut donc enlever les triangles invalides de la triangulation de la cavité. Les potentiels voisins des nouveaux triangles sont parmi ces nouveaux triangles et parmi ceux qui étaient voisins des triangles enlevés.
Les triangles virtuels générés par la triangulation de la cavité permettent d'obtenir les nœuds des bords de cette cavité. Lorsqu'un segment de bord appartient à un et un seul triangle, un nouveau triangle virtuel doit être généré pour ce bord, car il s'agit d'un nouveau bord de la triangulation.
Lorsque le nœud est enlevé, les triangles contenant ce nœud sont enlevés et une liste de leurs voisins est générée. Après création des nouveaux triangles, les voisins de ceux-ci sont recherchés dans cette liste.
La classe Maillage6, dérivée de la classe Maillage5, comporte en plus la fonction pour enlever un nœud. Elle comporte aussi une fonction pour détecter l'intersection de deux triangles, bien que celle-ci devrait plutôt être placée dans la classe Triangle.
class Maillage6(Maillage5):
def __init__(self):
Maillage5.__init__(self)
def intersectionCotes(self,A,B,C,D,eps=0):
det = (B.y-A.y)*(C.x-D.x)-(D.y-C.y)*(A.x-B.x)
if det==0: return False
x = (((B.y-A.y)*A.x+(A.x-B.x)*A.y)*(C.x-D.x)-((D.y-C.y)*C.x+(C.x-D.x)*C.y)*(A.x-B.x))/det
y = (((D.y-C.y)*C.x+(C.x-D.x)*C.y)*(B.y-A.y)-((B.y-A.y)*A.x+(A.x-B.x)*A.y)*(D.y-C.y))/det
test1 = (x-A.x)*(B.x-A.x)+(y-A.y)*(B.y-A.y) > eps
test2 = (x-B.x)*(A.x-B.x)+(y-B.y)*(A.y-B.y) > eps
test3 = (x-C.x)*(D.x-C.x)+(y-C.y)*(D.y-C.y) > eps
test4 = (x-D.x)*(C.x-D.x)+(y-D.y)*(C.y-D.y) > eps
test = test1 and test2 and test3 and test4
if test: return Noeud(x,y)
return None
def intersectionTriangles(self,tr1,tr2):
if tr1.virtuel or tr2.virtuel:
return False
if tr1==tr2: return False
paires = [(0,1),(0,2),(1,2)]
if (tr1.noeuds[0] in tr2.noeuds) and (tr1.noeuds[1] in tr2.noeuds) and (tr1.noeuds[2] in tr2.noeuds): # triangles identiques
return True
for p in paires:
for q in paires:
A = tr1.noeuds[p[0]]
B = tr1.noeuds[p[1]]
C = tr2.noeuds[q[0]]
D = tr2.noeuds[q[1]]
if A!=C and A!=D and B!=C and B!=D and self.intersectionCotes(A,B,C,D): return True
return False
def enleverNoeud(self,n):
self.noeuds.remove(n)
voisins = [] # voisins des triangles enlevés
retrait = [] # triangles à enlever
for tr in n.triangles:
for trv in tr.voisins:
if not(n in trv.noeuds) and not(trv in voisins):
voisins.append(trv)
retrait.append(tr)
# recherche des noeuds du polyèdre dans le sens direct
polyedre = []
recherche = True
premier = None
k = 0
while recherche:
i = 0
while tr.noeuds[i]!=n: i = (i+1)%3
# i : indice du noeud dans le triangle
k += 1
if not(tr.virtuel):
i1 = (i+1)%3
i2 = (i1+1)%3
n1 = tr.noeuds[i1]
if n1==premier:
recherche = False
break
if premier==None : premier = n1
n2 = tr.noeuds[i2]
polyedre.append(n1)
suivant = False
for t in n.triangles: # recherche du triangle suivant
if t!=tr and n2 in t.noeuds:
tr = t
suivant = True
break
else:
i1 = abs(i-1)
n1 = tr.noeuds[i1] # l'autre noeud réel
if i1==1:
for t in n.triangles:
if t!=tr and not(t.virtuel) and n1 in t.noeuds:
tr = t
break
else:
polyedre.append(n1)
for t in n.triangles:
if t!=tr and t.virtuel:
tr = t
break
N = len(polyedre)
virtuels = []
for tr in retrait:
for tv in tr.voisins:
if tv.virtuel and (tv.noeuds[0] in tr.noeuds) and (tv.noeuds[1] in tr.noeuds): # triangle virtuel ajdacent
virtuels.append(tv)
for tr in virtuels:
tr.draw("b-",linewidth=3)
self.enleverTriangle(tr)
for tr in retrait:
self.enleverTriangle(tr)
cavite = Maillage6()
cavite.triangleInitial(polyedre[0],polyedre[1],polyedre[2])
try:
if len(polyedre) > 3:
cavite.ajouterListeNoeuds(polyedre[3::],len(polyedre)-3)
except:
print("échec de triangulation de la cavité")
return
#cavite.draw("g-",linewidth=3)
# recherche des triangles générés à conserver
insert = []
retraitCavite = []
bordsCavite = []
for tr in cavite.triangles:
insertion = True
if tr.virtuel:
insertion=False
bordsCavite.append([tr.noeuds[0],tr.noeuds[1]])
else:
for tv in voisins:
if self.intersectionTriangles(tv,tr):
insertion = False
break
if insertion:
insert.append(tr)
else:
retraitCavite.append(tr)
# on enlève les triangles inutiles de la cavité (pour la mise à jour des noeuds)
for tr in retraitCavite:
cavite.enleverTriangle(tr)
#recherche des bords pour créer les nouveaux triangles virtuels.
trianglesVirtuels = []
for seg in bordsCavite:
n1 = seg[0]
n2 = seg[1]
num = 0
for tr in n1.triangles:
if n2 in tr.noeuds:
num += 1
if num==1: # segment appartenant à un seul triangle
tv = TriangleVirtuel2(n1,n2)
#if not(tv.dansCercle(n)):
# tv.noeuds[0],tv.noeuds[1] = tv.noeuds[1],tv.noeuds[0]
trianglesVirtuels.append(tv)
for tr in trianglesVirtuels:
insert.append(tr)
self.nouvTriangles = insert
self.voisins = voisins
self.polyedre = polyedre
self.trianglesVirtuels = trianglesVirtuels
# insertion des nouveaux triangles dans la triangulation
for tr in insert:
self.triangles.append(tr)
for tv in voisins:
if tv.triangleVoisin(tr):
tr.ajouterVoisin(tv)
tv.ajouterVoisin(tr)
Voici un exemple, comportant deux nœuds qui vont être enlevés :
maillage = Maillage6()
n1 = Noeud(-10,-10)
n2 = Noeud(10,-10)
n3 = Noeud(0,10)
maillage.triangleInitial(n1,n2,n3)
N = 30
x = uniform(-10,10,N)
y = uniform(-10,10,N)
noeuds = []
for i in range(N):
n = Noeud(x[i],y[i])
noeuds.append(n)
n1 = Noeud(0,0) # noeud central à enlever
noeuds.append(n1)
n2 = Noeud(-11,11) # noeud de bord à enlever
noeuds.append(n2)
maillage.ajouterListeNoeuds(noeuds,len(noeuds))
figure(figsize=(8,8))
maillage.draw("k-")
n1.draw("ro")
n2.draw("ro")
xlim(-12,12)
ylim(-12,12)
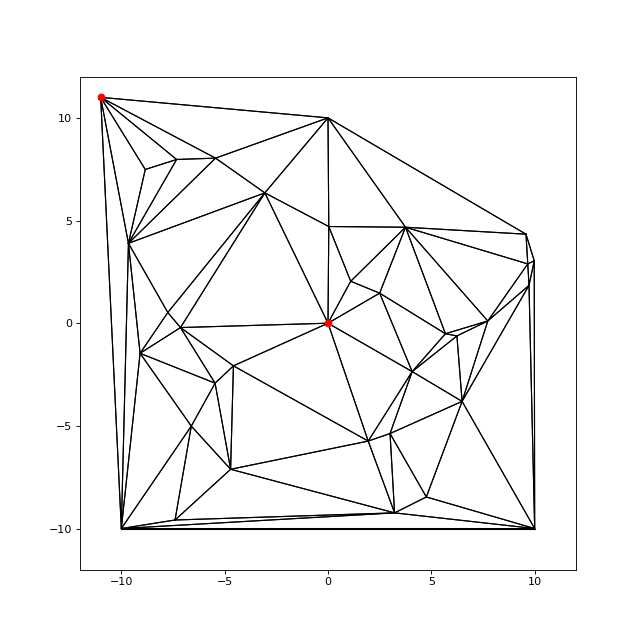 fig18.pdf
fig18.pdf
close()
Les nœuds à enlever sont marqués en rouge. On enlève le nœud situé au centre :
figure(figsize=(8,8))
noeuds.remove(n1)
n1.draw("ro")
maillage.enleverNoeud(n1)
maillage.draw("k-")
for tr in maillage.nouvTriangles:
tr.draw("r-")
xlim(-12,12)
ylim(-12,12)
invalid = maillage.verifierDelaunay()
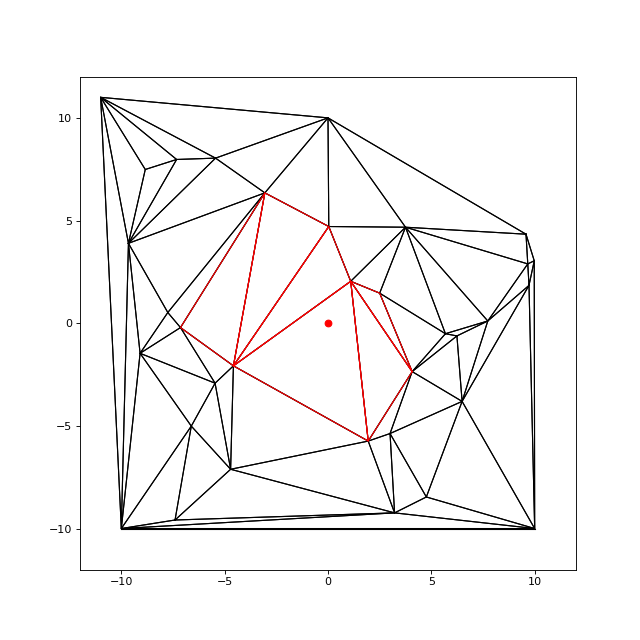 fig19.pdf
fig19.pdf
close()
print(invalid) --> 0
Les nouveaux triangles sont tracés en rouge. On retire le nœud du bord :
figure(figsize=(8,8))
noeuds.remove(n2)
n2.draw("ro")
maillage.enleverNoeud(n2)
maillage.draw("k-")
for tr in maillage.nouvTriangles:
tr.draw("r-")
xlim(-12,12)
ylim(-12,12)
invalid = maillage.verifierDelaunay()
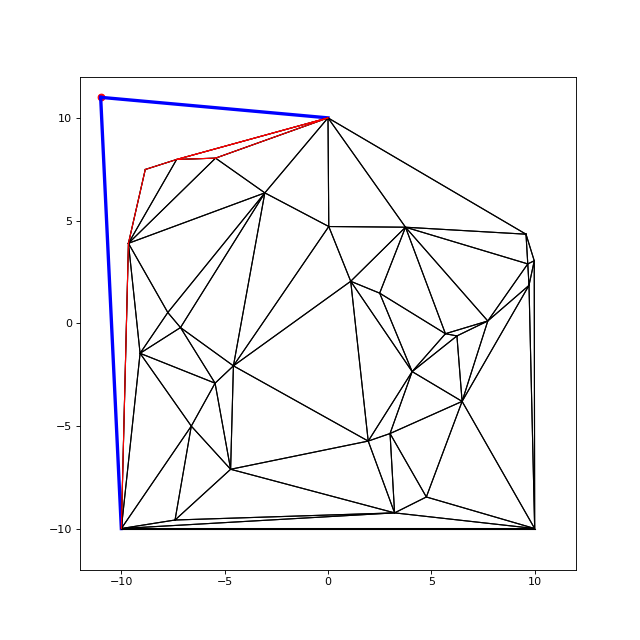 fig20.pdf
fig20.pdf
close()
print(invalid) --> 0
Parmi les nouveaux triangles, il y a les nouveaux triangles virtuels, correspondant aux nouveaux bords. On enlève quelques nœuds sélectionnés au hasard
for k in range(10):
i = random.randint(0,len(noeuds)-1)
n = noeuds[i]
noeuds.remove(n)
maillage.enleverNoeud(n)
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-12,12)
ylim(-12,12)
invalid = maillage.verifierDelaunay()
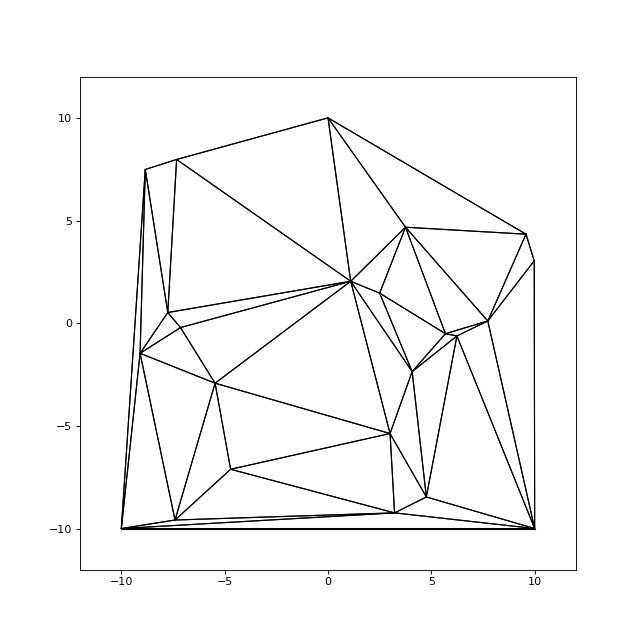 fig21.pdf
fig21.pdf
close()
print(invalid) --> 0
4. Triangulation de Delaunay contrainte
4.a. Définition
Les maillages utilisées pour la méthode des éléments finis comportent des frontières sur lesquelles des conditions limites sont imposées, en particulier la condition limite de Neumann. Des nœuds doivent évidemment se trouver sur ces frontières et il faut qu'elles soient représentées par des côtés de triangles, c'est-à-dire qu'aucun triangle ne doit traverser une frontière. On appelera segment un côté de la frontière constitué de deux nœuds consécutifs. Chaque segment doit appartenir à un triangle, comme l'illuste la figure suivante, où la frontière est tracée en trait plus épais :
Figure pleine page{kind=link}
Une triangulation de Delaunay contrainte doit respecter ces contraintes sur les segments. L'ensemble d'éléments à triangulariser est donc constitué d'un ensemble de nœuds et d'un ensemble de segments (constitués de nœuds appartenant au premier).
Il est plus simple d'obtenir cette triangulation si l'on accepte que les triangles adjacents aux segments ne sont pas nécessairement Delaunay. En effet, dans le cas contraire, on doit ajouter des nœuds à l'ensemble introduit initialement. On considère donc une triangulation de Delaunay contrainte dans laquelle les triangles adjacents aux segments ne sont pas nécessairement Delaunay (la triangulation n'est donc pas Delaunay). Il s'en suit que les segments ne sont pas nécessairement Delaunay ni localement Delaunay.
Les triangles adjacents aux segments doivent être Delaunay contraints (Delaunay-C), une propriété moins forte que Delaunay. On dit qu'un nœud A est invisible d'un nœud B si le segment AB coupe un segment de la frontière mais n'en fait pas partie, autrement dit si les deux nœuds sont séparés par la frontière. Par définition, un triangle Delaunay-C est un triangle dont le disque ouvert circonscrit peut contenir un nœud à condition qu'il soit invisible de tous les points de l'intérieur du triangle.
Figure pleine page{kind=link}
Sur la figure ci-dessus, N1N2 est un segment de la frontière. Le triangle adjacent T, constitué des nœuds N1,N2,N3 est Delaunay-C : son disque ouvert circonscrit contient le nœud N mais celui-ci est invisible depuis tout point situé dans le triangle T. Le côté N1N2 n'est pas localement Delaunay : il n'a pas de disque ouvert circonscrit ne contenant aucun nœud des deux triangles adjacents.
4.b. Ajout d'un nœud
Considérons l'ajout d'un nœud N dans un triangulation Delaunay-C, qui peut comporter déjà des segments de frontière. Dans l'algorithme de Bowyer-Watson appliqué à une triangulation Delaunay, on élimine tous les triangles qui ne sont plus Delaunay, c'est-à-dire dont le disque ouvert circonscrit contient N. Dans le cas présent, on doit éliminer seulement les triangles qui ne sont plus Delaunay-C. Cela est obtenu avec une variante de l'algorithme de Bowyer-Watson :
- (1) Recherche d'un triangle contenant N (ce nœud peut être sur un côté).
- (2) Recherche récursive de tous les triangles dont le disque ouvert circonscrit contient N mais sans franchir un segment de frontière. Ces triangles forment une cavité polyhédrique.
- (3) Retrait des triangles de la cavité.
- (4) Génération des triangles constitués de N et des côtés non partagés des triangles de la cavité.
Les étapes (1) et (2) sont modifiées. Pour l'étape (1), on recherche un triangle contenant N, pas seulement un triangle dont le disque ouvert circonscrit contient N. Dans l'étape (2), la recherche récursive par triangles voisins s'arrête lorsqu'on travserse un segment de la frontière.
Figure pleine page{kind=link}
Si les nœuds ajoutés sont préalablement enregistrés dans un graphe de conflits, le premier triangle trouvé a simplement un disque ouvert circonscrit contenant N mais ne contient pas nécessairement N. Supposons que ce premier triangle soit T1 sur la figure ci-dessus. Une recherche récursive par voisinage permet de trouver le triangle qui contient N (triangle T2). Si N se trouve exactement sur un côté commun à deux triangles, on obtient l'un des deux triangles auxquels N appartient. À partir de T2, on recherche récursivement les triangles dont le disque ouvert circonscrit contient N mais sans jamais franchir la frontière. On obtient T1 et T4. Lorsqu'on parvient à T5 à partir de T4, ces deux triangles ont un côté commun qui appartient à la frontière donc T5 n'est pas retenu et on ne recherche pas parmi ses voisins. On enlève donc les triangles T1,T2,T4 et on construit 4 nouveaux triangles à partir de N et des côtés de la cavité. Remarquons que le triangle T5 n'a pas été enlevé bien que son disque ouvert circonscrit contient N. Si on l'avait enlevé, le segment de frontière qu'il contient aurait évidemment été enlevé, ce que précisément on ne veut pas faire. Les nouveaux triangles sont Delaunay-C.
Si le nouveau nœud N est sur un segment de frontière (on verra plus loin que cela survient lorsqu'on subdivise le segment), il y a deux côtés adjacents qui contiennent N, de part et d'autre du segment. Il faut faire une recherche récursive à partir de chacun de ces deux triangles, ce qui conduit à deux cavités de part et d'autre de la frontière, comme le montre la figure suivante :
Figure pleine page{kind=link}
La réunion de ces deux cavités en forme une seule, dont la triangulation permet d'obtenir deux segments à partir du segment initial.
4.c. Ajout d'un segment de frontière
Un segment de frontière peut être ajouté dès que ses deux nœuds ont été ajoutés. Dans un premier temps, on peut par exemple obtenir une triangulation de Delaunay avec tous les nœuds (y compris ceux des frontières) puis ajouter les segments. Après cela, il sera toujours possible d'ajouter d'autres nœuds avec l'algorithme décrit ci-dessus.
La première étape de l'ajout d'un segment consiste à éliminer les triangles coupés par ce segment. La figure suivante montre un exemple avec un segment AB à ajouter :
Figure pleine page{kind=link}
Les triangles T1,T2,T3 sont retirés car il sont coupés par le segment. Le retrait de ces triangles puis l'ajout du segment donne deux cavités C1 et C2 que l'on triangularise comme expliqué dans la partie Retrait d'un nœud. Sur cet exemple, il n'y a rien à faire pour la cavité C2 puisqu'elle ne contient que 3 nœuds. À la différence du remplissage d'une cavité dans une triangulation de Delaunay, les nouveaux triangles peuvent être simplement Delaunay-C (il est évident sur la figure que les triangles créés dans C1 et C2 ne sont pas Delaunay mais Delaunay-C).
Il faut détecter efficacement les triangles coupés par le segment AB. Un triangle est coupé par le segment si et seulement si au moins un de ses côtés est coupé par le segment (voir en annexe le test d'intersection de deux triangles). On commence à tester les triangles auquels le nœud A appartient. Si une intersection est trouvée, il faut tester le triangle adjacent à ce dernier et rechercher une intersection sur ses deux autres côtés et ainsi de suite jusqu'à rencontrer un triangle pour lequel il n'y a qu'une intersection (le triangle contenant le nœud B. Il peut arriver qu'une partie du segment soit déjà un côté d'un triangle, comme le montre la figure suivante :
Figure pleine page{kind=link}
Il y a deux triangles, T1 et T2, qui ont deux nœuds situés sur le segment. Ces deux triangles sont retirés. Il faut continuer la recherche sur les triangles auxquels le second nœud appartient. Les deux triangles T3 et T4, coupés par le segment en un sommet, sont aussi à retirer.
La recherche de l'intersection d'un triangle avec le segment AB a trois réponses possibles :
- (1) Aucune intersection.
- (2) Une seule intersection sur un sommet.
- (3) Deux intersections sur deux sommets.
- (4) Une intersection sur un côté et une intersection sur un sommet.
- (5) Une intersection sur un côté et une intersection sur un côté.
Le triangle est enlevé dans les cas (2),(3),(4) et (5). Lorsqu'il y a deux intersections, on les range par distance croissante au nœud A. La deuxième intersection permet de savoir comment rechercher le triangle suivant :
- (a) S'il s'agit d'un sommet, on arrête la recherche si ce sommet est le nœud B, sinon on recherche le triangle contenant ce nœud qui a deux intersections avec le segment.
- (b) S'il s'agit d'un côté, on recherche le triangle adjacent, c'est-à-dire le triangle qui a ce côté mais qui n'est pas le premier.
La recherche se fait ainsi de manière itérative en parcourant les triangles dans l'ordre d'intersection par le segment orienté AB. Pour démarrer la recherche, il faut trouver le triangle contenant A qui a deux intersections avec le segment.
Lorsque les triangles coupés par le segment sont trouvés, on récupère leurs sommets et on génère les nœuds des deux cavités, constituées respectivement des nœuds situés à gauche et à droite du segment orienté AB. La triangulation de ces cavités se fait comme expliqué dans la partie Retrait d'un nœud. Cette triangularisation générée comporte évidemment un triangle ayant le segment AB pour côté. Contrairement au cas du retrait d'un nœud, le rangement des nœuds d'une cavité dans le sens direct, nécessaire pour traiter les bords, n'est plus trivial.
La classe Maillage6 est complétée pour permettre l'ajout de segments. Ceux-ci sont stockés dans une liste.
La fonction intersectionCoteSegment renvoie l'intersection éventuelle entre un côté de triangle et un segment.
La fonction rechercheTrianglesConflit, qui constitue les étapes 1 et 2 de l'algorithme de Bowyer-Watson, est réécrite afin de pouvoir fonctionner lorsque des nœuds sont ajoutés alors qu'une frontière a déjà été définie. Lorsqu'une frontière est définie, il est sous-entendu qu'on n'ajoute plus de nœuds externes à l'enveloppe convexe des nœuds déjà présents. Le premier triangle à retirer est donc le triangle qui contient le nœud ajouté.
La fonction ajouterNoeudSurSegment permet d'ajouter un nœud sur un segment de frontière.
class Maillage7(Maillage6):
def __init__(self):
Maillage6.__init__(self)
self.segments = []
def rechercheTrianglesConflit(self,n,trConflit=None):
frontiere = False
if len(self.segments)>0: frontiere = True
def rechercheTriangleContenant(n,tr,premier,trRecherche):
for t in tr.voisins:
if not(t.virtuel) and t.contientNoeud(n):
premier.append(t)
return
elif not(t in trRecherche) and t.dansCercle(n):
trRecherche.append(t)
rechercheTriangleContenant(n,t,premier,trRecherche)
#if len(premier)>0: return
tr = None
if trConflit:
tr = trConflit
elif not(n.triangleConflit):
for t in self.triangles:
if t.virtuel:
continue
if frontiere and t.contientNoeud(n):
tr = t
break
elif not(frontiere) and t.dansCercle(n):
tr = t
break
else:
tr = n.triangleConflit
if frontiere:
if tr.contientNoeud(n):
premier = [tr]
else:
premier = []
trRecherche = []
rechercheTriangleContenant(n,tr,premier,trRecherche)
else:
premier = [tr]
if len(premier)==0:
print("triangle en conflit non trouvé")
if trConflit: trConflit.draw("g-",linewidth=2)
return []
def rechercheCavite(n,tr,trCavite):
for t in tr.voisins:
frontiereFranchie = False
for seg in self.segments:
if t.contientCote(seg[0],seg[1]) and tr.contientCote(seg[0],seg[1]):
frontiereFranchie=True
break
if not(frontiereFranchie) and not(t in trCavite) and t.dansCercle(n):
trCavite.append(t)
rechercheCavite(n,t,trCavite)
trCavite = []
trCavite.append(premier[0])
rechercheCavite(n,premier[0],trCavite) # recherche récursive des autres triangles
return trCavite
def ajouterNoeudSurSegment(self,n,seg):
# recherche des triangles dont un côté est le segment (un ou deux)
N1 = seg[0]
N2 = seg[1]
triangles = []
for tr in N1.triangles:
if not(tr in triangles) and(N2 in tr.noeuds):
triangles.append(tr)
trCavite = self.rechercheTrianglesConflit(n,triangles[0])
if len(trCavite)==0: return
if len(triangles)>1:
trCavite += self.rechercheTrianglesConflit(n,triangles[1])
self.noeuds.append(n)
nouveaux = []
# mise à jour du graphe des conflits
noeudsSansConflit = [] # noeuds n'ayant plus de triangle associé dans le graphe des conflits
for tr in trCavite:
for no in tr.noeudsConflit:
if no!=n:
noeudsSansConflit.append(no)
no.enleverConflit()
for i in range(len(trCavite)):
tr = trCavite[i]
self.enleverTriangle(tr)
for c in [[0,1],[0,2],[1,2]]: # recherche du côté non partagé
na = tr.noeuds[c[0]]
nb = tr.noeuds[c[1]]
ajout = True
for j in range(len(trCavite)):
if i!=j:
if trCavite[j].contientCote(na,nb):
ajout = False
break
if ajout:
if nb!=None:
nouvTr = Triangle2(n,na,nb)
else :
if tr.noeuds[0]==na:
nouvTr = TriangleVirtuel2(na,n)
else:
nouvTr = TriangleVirtuel2(n,na)
nouveaux.append(nouvTr)
self.triangles.append(nouvTr)
# recherche d'un triangle en conflit pour chaque noeud qui n'en a plus
# nouvTr est-il en conflit avec l'un de ces noeuds ?
for nsc in noeudsSansConflit:
if nouvTr.virtuel==False:
if nsc.triangleConflit==None and nouvTr.dansCercle(nsc):
nsc.definirConflit(nouvTr)
nouvTr.ajouterConflit(nsc)
else:
if nsc.triangleConflit==None and nouvTr.dansCercle(nsc) :
nsc.definirConflit(nouvTr)
nouvTr.ajouterConflit(nsc)
# recherche des voisins du nouveau triangle parmi les voisins des triangles enlevés
voisins = []
for t in trCavite:
for trv in t.voisins:
if not(trv in trCavite) and not(trv in voisins) and trv.triangleVoisin(nouvTr):
nouvTr.ajouterVoisin(trv)
trv.ajouterVoisin(nouvTr)
voisins.append(trv)
# les nouveaux triangles sont voisins
for i in range(len(nouveaux)):
for j in range(len(nouveaux)):
if i!=j and nouveaux[i].triangleVoisin(nouveaux[j]):
nouveaux[i].ajouterVoisin(nouveaux[j])
self.nouvTr = nouveaux
return len(nouveaux)
def alignement(self,nA,nB,n):
test1 = abs((n.x-nA.x)*(nB.y-nA.y)-(n.y-nA.y)*(nB.x-nA.x)) < self.eps
test2 = (n.x-nA.x)*(nB.x-nA.x)+(n.y-nA.y)*(nB.y-nA.y) >= 0
test3 = (n.x-nB.x)*(nA.x-nB.x)+(n.y-nB.y)*(nA.y-nB.y) >= 0
return test1 and test2 and test3
def trierIntersect(self,A,intersect):
n1 = intersect[0][0]
n2 = intersect[1][0]
d1 = (n1.x-A.x)**2+(n1.y-A.y)**2
d2 = (n2.x-A.x)**2+(n2.y-A.y)**2
if d1 > d2:
return (intersect[1],intersect[0])
else:
return intersect
def intersectionTriangleSegment(self,tr,nA,nB):
intersect = []
if tr.virtuel: return intersect
#liste d'intersections
# intersection : (P,[n]), P : point d'intersection, [n] : liste des sommets du triangles (côté ou sommet coupé)
for n in tr.noeuds:
if n!=None and self.alignement(nA,nB,n):
#print("alignement :",n.x,n.y)
intersect.append((n,[n]))
if len(intersect)<2:
for p in [(0,1),(1,2),(2,0)]:
nC = tr.noeuds[p[0]]
nD = tr.noeuds[p[1]]
P = self.intersectionCotes(nA,nB,nC,nD,eps=1e-11)
if P: intersect.append((P,[nC,nD]))
if len(intersect) != 2: return intersect
return self.trierIntersect(nA,intersect)
def ajouterSegment(self,nA,nB,debug=False):
self.segments.append([nA,nB])
retrait = []
for tr in nA.triangles:
intersect = self.intersectionTriangleSegment(tr,nA,nB)
if len(intersect)==2:
retrait.append(tr)
triangle = tr
inter = intersect
recherche = True
intersect = inter
i=0
while recherche:
noeuds = intersect[1][1] #intersection la plus éloignée de A
if len(noeuds)==2: # intersection avec un côté d'un triangle
n1 = noeuds[0]
n2 = noeuds[1]
#recherche du triangle adjacent
for tr in n1.triangles:
if not(tr in retrait) and tr in n2.triangles:
if nB in tr.noeuds: recherche = False
intersect = self.intersectionTriangleSegment(tr,nA,nB)
if len(intersect)==2:
retrait.append(tr)
elif len(noeuds)==1: # intersection avec un sommet d'un triangle
n1 = noeuds[0]
for tr in n1.triangles: # recherche des triangles voisins coupés par le segment
if not(tr in retrait):
intersection = self.intersectionTriangleSegment(tr,nA,nB)
if len(intersection)==2:
retrait.append(tr)
if nB in tr.noeuds: recherche = False
intersect = intersection
if len(intersection)==1:
if nB in tr.noeuds:
recherche = False
break
retrait.append(tr)
i+=1
if i>100:
recherche=False
print("échec de la recherch des intersectiond segment triangles")
polyedre1 = []
polyedre2 = []
polyedre1.append(nA)
polyedre2.append(nA)
for tr in retrait:
for n in tr.noeuds:
if not(n in polyedre1) and (n.x-nA.x)*(nB.y-nA.y)-(n.y-nA.y)*(nB.x-nA.x) >self.eps:
polyedre1.append(n)
if not(n in polyedre2) and (n.x-nA.x)*(nB.y-nA.y)-(n.y-nA.y)*(nB.x-nA.x) <-self.eps:
polyedre2.append(n)
polyedre1.append(nB)
polyedre2.append(nB)
voisins1 = []
for n in polyedre1:
for tr in n.triangles:
if not(tr in voisins1) and not(tr in retrait):
voisins1.append(tr)
voisins2 = []
for n in polyedre2:
for tr in n.triangles:
if not(tr in voisins2) and not(tr in retrait):
voisins2.append(tr)
for tr in retrait:
if debug : tr.draw("r-")
self.enleverTriangle(tr)
insert1 = []
retraitCavite1 = []
bordsCavite1 = []
insert2 = []
retraitCavite2 = []
bordsCavite2 = []
if len(polyedre1) >2:
cavite1 = Maillage7()
cavite1.triangleInitial(polyedre1[0],polyedre1[1],polyedre1[2])
try:
if (len(polyedre1)>3):
cavite1.ajouterListeNoeuds(polyedre1[3::],len(polyedre1)-3)
except:
print("échec de triangulation de la cavité 1")
return
# recherche des triangles générés à conserver
insert1 = []
retraitCavite1 = []
bordsCavite1 = []
for tr in cavite1.triangles:
insertion = True
if tr.virtuel:
insertion=False
bordsCavite1.append([tr.noeuds[0],tr.noeuds[1]])
else:
for tv in voisins1:
if self.intersectionTriangles(tv,tr):
insertion = False
break
if insertion:
insert1.append(tr)
else:
retraitCavite1.append(tr)
if len(polyedre2)>2:
cavite2 = Maillage7()
cavite2.triangleInitial(polyedre2[0],polyedre2[1],polyedre2[2])
try:
if (len(polyedre2)>3):
cavite2.ajouterListeNoeuds(polyedre2[3::],len(polyedre2)-3)
except:
print("échec de triangulation de la cavité 2")
return
for tr in cavite2.triangles:
insertion = True
if tr.virtuel:
insertion=False
bordsCavite2.append([tr.noeuds[0],tr.noeuds[1]])
else:
for tv in voisins2:
if self.intersectionTriangles(tv,tr):
insertion = False
break
if insertion:
insert2.append(tr)
else:
retraitCavite2.append(tr)
# on enlève les triangles inutiles des cavités (pour la mise à jour des noeuds)
for tr in retraitCavite1:
cavite1.enleverTriangle(tr)
for tr in retraitCavite2:
cavite2.enleverTriangle(tr)
# insertion des nouveaux triangles dans la triangulation
for tr in insert1:
self.triangles.append(tr)
for tv in voisins1:
if tv.triangleVoisin(tr):
tr.ajouterVoisin(tv)
tv.ajouterVoisin(tr)
for tr in insert2:
self.triangles.append(tr)
for tv in voisins2:
if tv.triangleVoisin(tr):
tr.ajouterVoisin(tv)
tv.ajouterVoisin(tr)
def drawSegments(self,style="r-",linewidth=1):
for seg in self.segments:
plot([seg[0].x,seg[1].x],[seg[0].y,seg[1].y],style,linewidth=linewidth)
Voici un exemple, comportant deux nœuds qui vont servir à définir un segment de frontière :
maillage = Maillage7()
n1 = Noeud(-10,-10)
n2 = Noeud(10,-5)
n3 = Noeud(0,10)
maillage.triangleInitial(n1,n2,n3)
N = 50
x = uniform(-10,10,N)
y = uniform(-10,10,N)
noeuds = []
for i in range(N):
n = Noeud(x[i],y[i])
noeuds.append(n)
nA = Noeud(-2,-2)
noeuds.append(nA)
nB = Noeud(6,5)
noeuds.append(nB)
maillage.ajouterListeNoeuds(noeuds,len(noeuds))
figure(figsize=(8,8))
maillage.draw("k-")
nA.draw("ro")
nB.draw("ro")
xlim(-12,12)
ylim(-12,12)
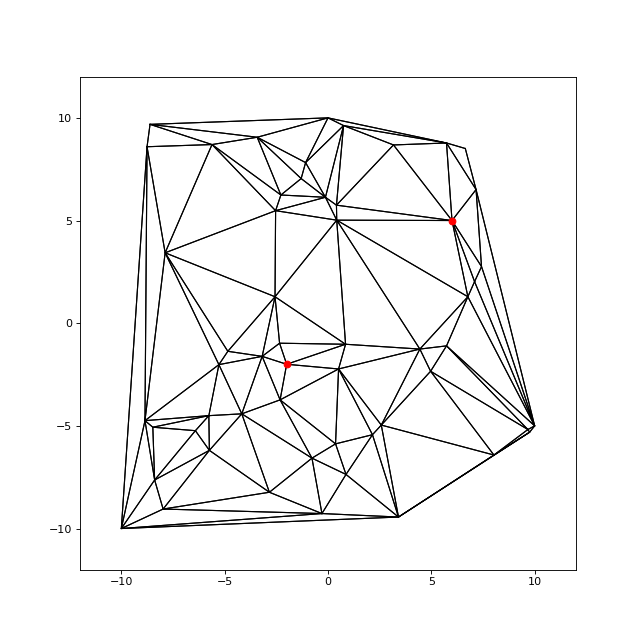 fig22.pdf
fig22.pdf
figure(figsize=(8,8))
maillage.draw("k-")
maillage.ajouterSegment(nA,nB)
plot([nA.x,nB.x],[nA.y,nB.y],"k--")
#nA.draw("ro")
#nB.draw("ro")
xlim(-12,12)
ylim(-12,12)
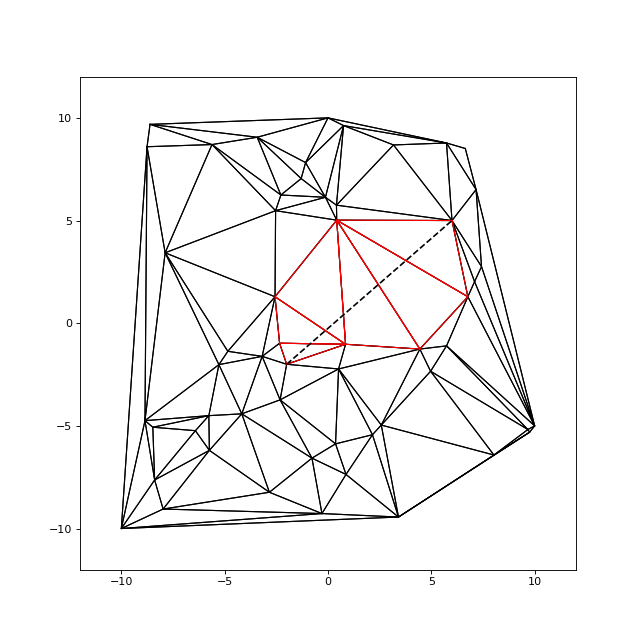 fig23.pdf
fig23.pdf
figure(figsize=(8,8))
maillage.draw("k-")
plot([nA.x,nB.x],[nA.y,nB.y],"k-",linewidth=3)
#nA.draw("ro")
#nB.draw("ro")
xlim(-12,12)
ylim(-12,12)
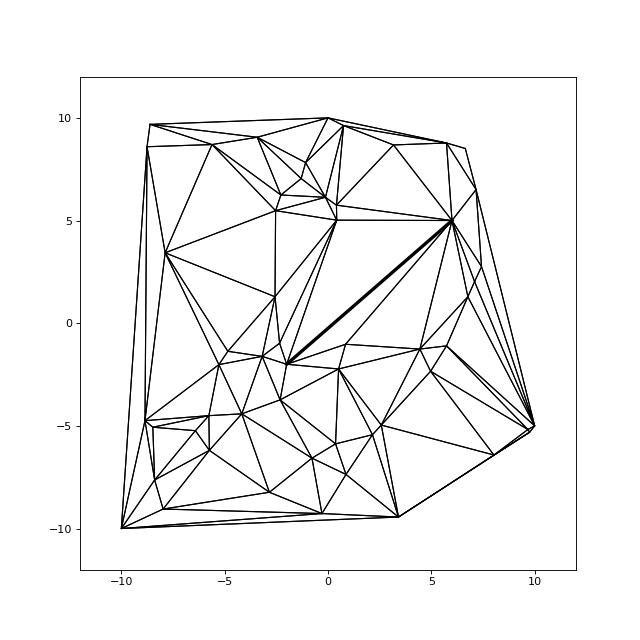 fig24.pdf
fig24.pdf
L'algorithme fonctionne aussi si les deux nœuds du segment sont sur les bords de la triangulation (les triangles virtuels ne sont pas affectés) :
figure(figsize=(8,8))
maillage.draw("k-")
bord = maillage.polyedreBord()
ia = random.randint(0,len(bord)-1)
ib = (ia+2)%len(bord)
nA = bord[ia]
nB = bord[ib]
maillage.ajouterSegment(nA,nB)
plot([nA.x,nB.x],[nA.y,nB.y],"k--")
xlim(-12,12)
ylim(-12,12)
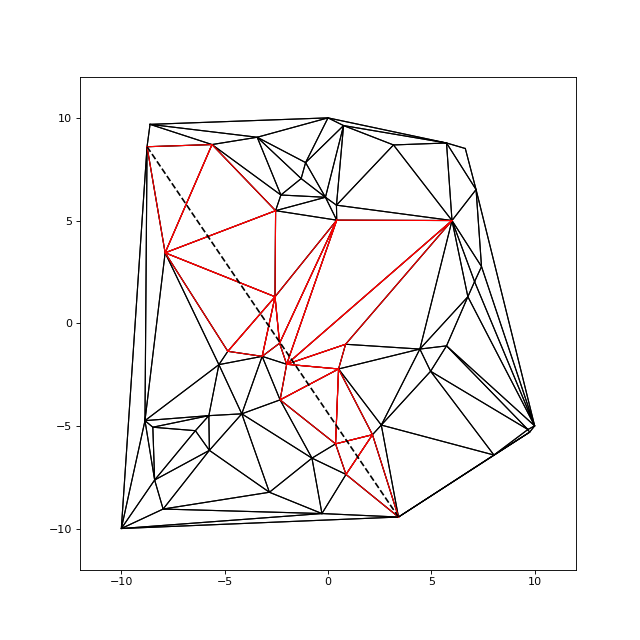 fig25.pdf
fig25.pdf
figure(figsize=(8,8))
maillage.draw("k-")
plot([nA.x,nB.x],[nA.y,nB.y],"k-",linewidth=3)
#nA.draw("ro")
#nB.draw("ro")
xlim(-12,12)
ylim(-12,12)
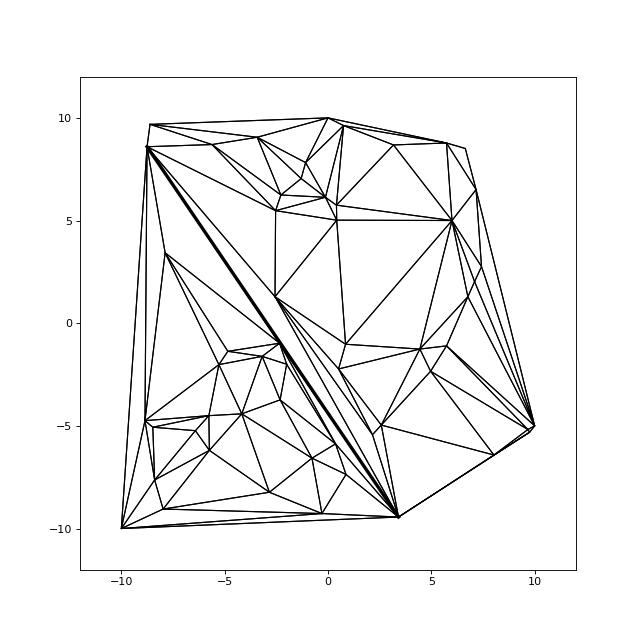 fig26.pdf
fig26.pdf
Voici un exemple où une frontière circulaire est générée à l'intérieur d'un maillage carré :
N = 30
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage7()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
R = 5
Nf = 30
dtheta = np.pi*2/Nf
frontiere = []
for i in range(Nf):
theta = i*dtheta
n = Noeud(R*np.cos(theta),R*np.sin(theta))
noeuds.append(n)
frontiere.append(n)
P += Nf
figure(figsize=(8,8))
maillage.ajouterListeNoeuds(noeuds,P)
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
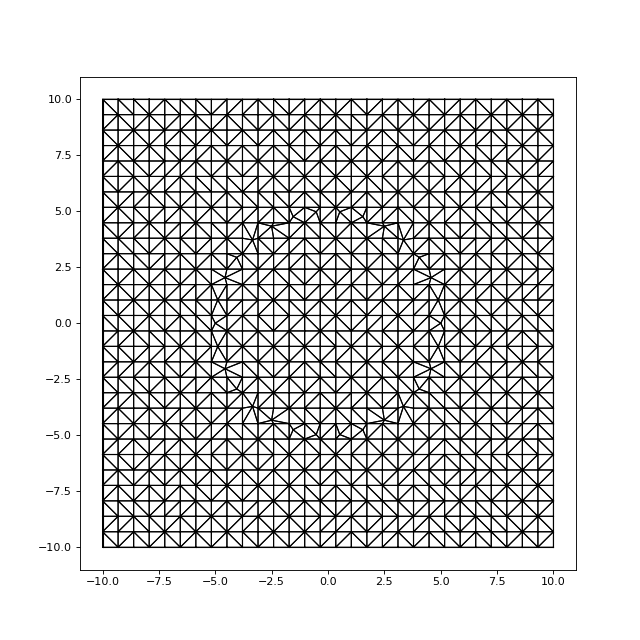 fig27.pdf
fig27.pdf
Dans cette triangulation de Delaunay, les segments de la frontière ne coïncident pas nécessairement avec un côté de triangle. On ajoute les segments :
for i in range(Nf-1):
maillage.ajouterSegment(frontiere[i],frontiere[i+1])
maillage.ajouterSegment(frontiere[Nf-1],frontiere[0])
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawSegments("r-")
xlim(-11,11)
ylim(-11,11)
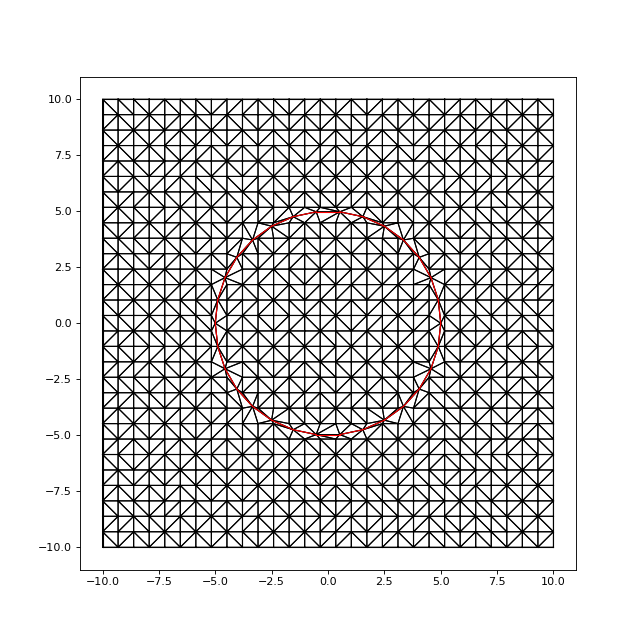 fig28.pdf
fig28.pdf
Voici un test de l'ajout d'un nœud après que la frontière soit créée avec une triangulation Delaunay-C. Lorsque le nœud ajouté n'est pas dans le graphe des conflits, une recherche itérative d'un triangle en conflit est faite dans la fonction rechercheTrianglesConflit.
figure(figsize=(8,8))
n1 = Noeud(R+0.3,0)
maillage.ajouterNoeud(n1)
n2 = Noeud(R-0.3,0)
maillage.ajouterNoeud(n2)
maillage.draw("k-")
maillage.drawSegments("r-")
n1.draw("ro")
n2.draw("ro")
xlim(2,8)
ylim(-3,3)
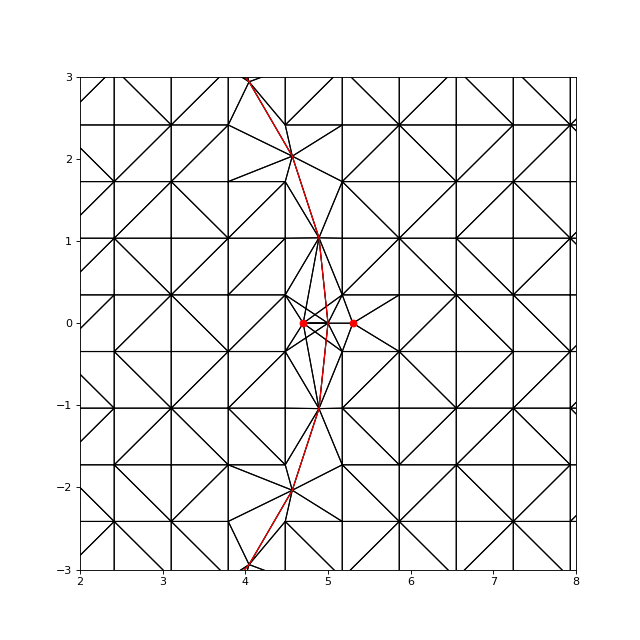 fig29.pdf
fig29.pdf
4.d. Triangulation d'un polygone
Supposons que l'on souhaite générer un maillage triangulaire à l'intérieur d'un polygone. Si celui-ci n'est pas convexe, l'algorithme développé précédemment génère un ensemble de triangles qui s'étendent dans l'enveloppe convexe de l'ensemble des nœuds, donc certains triangles ne sont pas à l'intérieur du polygone. Afin de générer un ensemble de triangles tous à l'intérieur du polygone, on procède en deux étapes :
- Ajout des segments définis par le polygone.
- Suppression des triangles situés à l'extérieur du polygone.
Par ailleurs, il peut arriver qu'on souhaite ne pas triangulariser l'intérieur d'un polygone, lorsque celui-ci définit un objet situé dans le maillage.
Soit un polygone défini par les nœuds avec . Deux points consécutifs définissent un côté du polygone, c'est-à-dire un segment qui doit être introduit dans la triangulation. Pour un point M du plan, on considère l'angle algébrique puis la somme de ces angles :
Si , le point M se trouve à l'extérieur du polygone. Si , il se trouve à l'intérieur du polygone. Les triangles qu'il faut éliminer sont ceux dont le centre se trouve soit à l'extérieur du polygone, soit à l'intérieur.
On définit une classe qui représente un polygone, comportant une fonction pour déterminer si un point est à l'intérieur du polygone et une fonction permettant de subdiviser chaque côtés en côtés de longueur donnée.
class Polygone:
def __init__(self,poly,interne):
self.poly = poly
self.interne = interne # True si l'intérieur est triangularisé
def subdivision(self,L):
N = len(self.poly)
nouvPoly = []
for i in range(N):
P1 = self.poly[i]
if i==N-1:
P2 = self.poly[0]
else:
P2 = self.poly[i+1]
d = np.sqrt((P2.x-P1.x)**2+(P2.y-P1.y)**2)
Np = int(d/L)
if Np<=1:
nouvPoly.append(P1)
else:
a = d/Np
ux = (P2.x-P1.x)/d
uy = (P2.y-P1.y)/d
for k in range(Np):
x = P1.x+a*k*ux
y = P1.y+a*k*uy
n = Noeud(x,y)
nouvPoly.append(n)
self.poly = nouvPoly
def angleCotePolygone(self,P1,P2,M):
z1 = P1.x-M.x + 1j*(P1.y-M.y)
z2 = P2.x-M.x + 1j*(P2.y-M.y)
z = z2/z1
return np.angle(z)
def interieur(self,M):
N = len(self.poly)
alpha = 0
for i in range(N):
P1 = self.poly[i]
if i==N-1:
P2 = self.poly[0]
else:
P2 = self.poly[i+1]
alpha += self.angleCotePolygone(P1,P2,M)
if abs(alpha) < 1e-2:
return False
else:
return True
Dès que la frontière polygonale du maillage est définie, les triangles virtuels ne sont plus utiles car il n'y aura plus de nœuds externes à ajouter. On supprimera donc les triangles virtuels avant de procéder à la suppression des triangles situés à l'extérieur du polygone définissant la frontière.
La classe Maillage7 est étendue : on lui ajoute une fonction pour insérer les segments d'un polygone et une autre pour effacer les triangles situés à l'extérieur ou à l'intérieur des polygones.
class Maillage8(Maillage7):
def __init__(self):
Maillage7.__init__(self)
self.polygones = []
def retirerVirtuels(self):
retrait = []
for tr in self.triangles:
if tr.virtuel:
retrait.append(tr)
for tr in retrait:
self.enleverTriangle(tr)
def ajouterPolygone(self,polygone):
self.polygones.append(polygone)
poly =polygone.poly
N = len(poly)
for i in range(len(poly)):
P1 = poly[i]
if i==N-1:
P2 = poly[0]
else:
P2 = poly[i+1]
self.ajouterSegment(P1,P2)
def enleverExterieurPolygone(self,polygone):
retrait = []
for tr in self.triangles:
if not(tr.virtuel):
M = Noeud((tr.noeuds[0].x+tr.noeuds[1].x+tr.noeuds[2].x)/3,(tr.noeuds[0].y+tr.noeuds[1].y+tr.noeuds[2].y)/3)
if polygone.interieur(M)!=polygone.interne:
retrait.append(tr)
for tr in retrait:
self.enleverTriangle(tr)
def enleverExterieurPolygones(self):
for polygone in self.polygones:
self.enleverExterieurPolygone(polygone)
def noeudInterne(self,N):
interne = True
for polygone in self.polygone:
for tr in self.triangles:
if not(tr.virtuel):
if polygone.interieur(M)!=polygone.interne:
interne = False
break
return interne
On reprend l'exemple précédent et on enlève les triangles situés à l'intérieur du cercle :
N = 30
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage8()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
R = 5
Nf = 30
dtheta = np.pi*2/Nf
frontiere = []
for i in range(Nf):
theta = i*dtheta
n = Noeud(R*np.cos(theta),R*np.sin(theta))
noeuds.append(n)
frontiere.append(n)
P += Nf
maillage.ajouterListeNoeuds(noeuds,P)
maillage.retirerVirtuels()
polygone = Polygone(frontiere,False)
maillage.ajouterPolygone(polygone)
maillage.enleverExterieurPolygones()
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
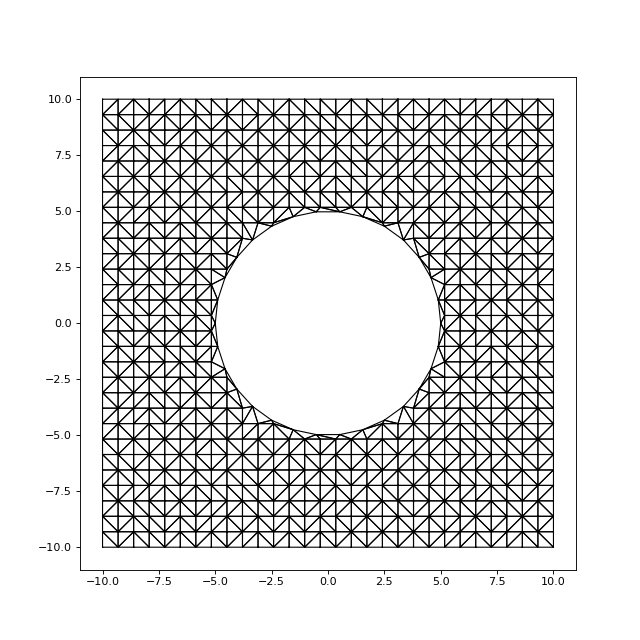 fig30.pdf
fig30.pdf
On peut aussi enlever les triangles situés à l'extérieur du cercle :
N = 30
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage8()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
R = 5
Nf = 30
dtheta = np.pi*2/Nf
frontiere = []
for i in range(Nf):
theta = i*dtheta
n = Noeud(R*np.cos(theta),R*np.sin(theta))
noeuds.append(n)
frontiere.append(n)
P += Nf
maillage.ajouterListeNoeuds(noeuds,P)
maillage.retirerVirtuels()
polygone = Polygone(frontiere,True)
maillage.ajouterPolygone(polygone)
maillage.enleverExterieurPolygones()
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
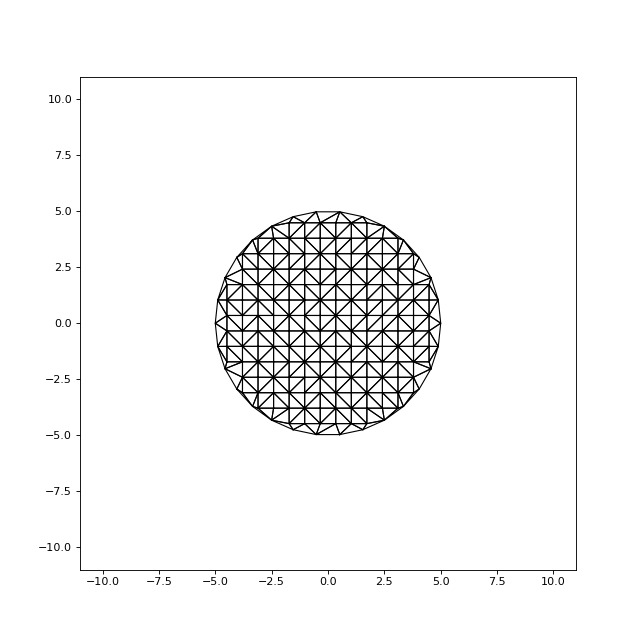 fig31.pdf
fig31.pdf
Voici un exemple avec deux polygones concaves :
N = 30
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage8()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
frontiere1 = []
frontiere1.append(Noeud(0,0))
frontiere1.append(Noeud(5,0))
frontiere1.append(Noeud(5,4))
frontiere1.append(Noeud(3,4))
frontiere1.append(Noeud(3,1))
frontiere1.append(Noeud(0,1))
polygone1 = Polygone(frontiere1,False)
polygone1.subdivision(1)
Nf = len(polygone1.poly)
for n in polygone1.poly:
noeuds.append(n)
P += Nf
frontiere2 = []
frontiere2.append(Noeud(-9,-9))
frontiere2.append(Noeud(3,-9))
frontiere2.append(Noeud(9,-3))
frontiere2.append(Noeud(9,9))
frontiere2.append(Noeud(-4,9))
frontiere2.append(Noeud(-4,4))
frontiere2.append(Noeud(-9,4))
polygone2 = Polygone(frontiere2,True)
polygone2.subdivision(1)
Nf = len(polygone2.poly)
for n in polygone2.poly:
noeuds.append(n)
P += Nf
maillage.ajouterListeNoeuds(noeuds,P)
maillage.retirerVirtuels()
maillage.ajouterPolygone(polygone1)
maillage.ajouterPolygone(polygone2)
maillage.enleverExterieurPolygones()
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
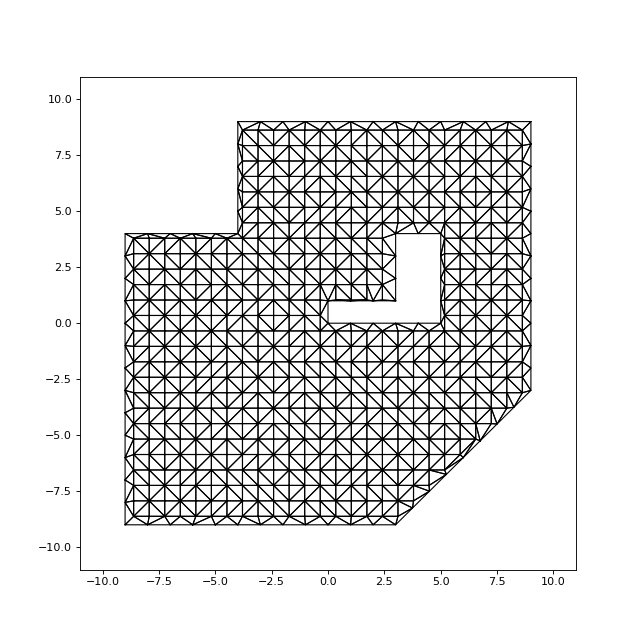 fig32.pdf
fig32.pdf
close()
L'ajout d'un nouveau nœud dans la triangulation comportant des polygones se fera en s'assurant que ce nœud est bien à l'intérieur (ou à l'extérieur) des polygones. La fonction noeudInterne détermine si un nœud est bien compatible avec tous les polygones, c'est-à-dire s'il est dans le domaine triangularisé.
5. Amélioration du maillage
5.a. Subdivision des frontières
Lorsqu'un segment de frontière est introduit dans une triangulation de Delaunay, certains triangles au voisinage de ce segment ne sont plus Delaunay mais simplement Delaunay-C. Si le segment a une grande longueur par rapport aux distances entre les sommets des triangles, les nouveaux triangles générés peuvent avoir un rapport très grand, c'est-à-dire un angle minimal trop petit. Considérons un segment N1N2 de la frontière et le disque dont le segment constitue un diamètre, que l'on appelera disque diamétrique. Considérons aussi un triangle dont le segment est un côté, le troisième nœud étant noté N3. Supposons que ce nœud soit à l'intérieur du disque diamétrique du segment.
Figure pleine page{kind=link}
Dans cette situation, il est intéressant subdiviser le segment en deux segments d'égales longueurs. Cela se fait simplement en introduisant le milieu du segment comme nouveau nœud N. Le cercle circonscrit du triangle N1N2N3 contient évidemment ce nouveau nœud. Les deux sous-segments sont nécessairement des côtés des nouveaux triangles générés par l'algorithme de Bowyer-Watson donc la frontière est conservée. La subdivision des segments est répétée jusqu'à ce que les disques diamétriques de tous les segments ne contiennent aucun nœud.
Nous devons écrire une fonction qui passe en revue les segments (ceux-ci sont mémorisés dans une liste) et qui, pour chacun d'entre eux, recherche d'éventuels nœuds appartenant au disque diamétrique. Les segments sont traités un par un et divisés récursivement. Au départ, la liste des nœuds potentiellement en conflit avec le segment est la liste de tous les nœuds de la triangulation. Cette liste est mise à jour en enlevant les nœuds qui ne sont pas dans le disque diamétrique du segment, ce qui accèlère la recherche s'il faut subdiviser un des sous-segments (si un nœud est dans le disque diamétrique d'un sous-segment il est nécessairement dans celui du segment).
Lorsque des segments sont associés à un polygone, le fait de subdiviser ces segments ne change rien au processus d'élimination des triangles internes ou externes au polygone, qui se fait toujours avec les segments initiaux du polygone.
La fonction subdiviserSegment effectue la subdivision d'un segment à partir d'une liste de nœuds à tester. Les segments créés sont ajoutés à la liste nouvSeg. La fonction subdiviserSegments effectue la subdivision de tous les segments. Par défaut, les nœuds testés sont tous les nœuds du maillage mais il est possible de spécifier une liste particulière de nœuds. La subdivision est répétée tant qu'il existe un nœud de cette liste appartenant au disque diamétrique d'un des segments. Le paramètre niveau précise le nombre maximal de subdivisions.
class Maillage9(Maillage8):
def __init__(self):
Maillage8.__init__(self)
def subdiviserSegment(self,seg,noeuds,nouvSeg):
N1 = seg[0]
N2 = seg[1]
xc = (N1.x+N2.x)/2
yc = (N1.y+N2.y)/2
r2 = ((N2.x-N1.x)**2+(N2.y-N1.y)**2)/4
noeudsConflit = []
for n in noeuds:
if (n.x-xc)**2+(n.y-yc)**2 < r2:
noeudsConflit.append(n)
if len(noeudsConflit)>0:
Nc = Noeud(xc,yc)
self.ajouterNoeudSurSegment(Nc,seg)
nouvSeg.append([N1,Nc])
nouvSeg.append([Nc,N2])
else:
nouvSeg.append([N1,N2])
def subdiviserSegments(self,noeuds=None,niveau=10):
division = True
if noeuds==None: noeuds = self.noeuds
while division and niveau>=0:
nouvSeg = []
niveau -= 1
for seg in self.segments:
self.subdiviserSegment(seg,noeuds,nouvSeg)
if len(nouvSeg)==len(self.segments):
division = False
else:
self.segments = nouvSeg
On reprend l'exemple précédent mais sans subdiviser les deux polygones :
N = 30
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage9()
noeuds = []
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
P = N*N-3
frontiere1 = []
frontiere1.append(Noeud(0,0))
frontiere1.append(Noeud(5,0))
frontiere1.append(Noeud(5,4))
frontiere1.append(Noeud(3,4))
frontiere1.append(Noeud(3,1))
frontiere1.append(Noeud(0,1))
polygone1 = Polygone(frontiere1,False)
Nf = len(polygone1.poly)
for n in polygone1.poly:
noeuds.append(n)
P += Nf
frontiere2 = []
frontiere2.append(Noeud(-9,-9))
frontiere2.append(Noeud(3,-9))
frontiere2.append(Noeud(9,-3))
frontiere2.append(Noeud(9,9))
frontiere2.append(Noeud(-4,9))
frontiere2.append(Noeud(-4,4))
frontiere2.append(Noeud(-9,4))
polygone2 = Polygone(frontiere2,True)
Nf = len(polygone2.poly)
for n in polygone2.poly:
noeuds.append(n)
P += Nf
maillage.ajouterListeNoeuds(noeuds,P)
maillage.ajouterPolygone(polygone1)
maillage.ajouterPolygone(polygone2)
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
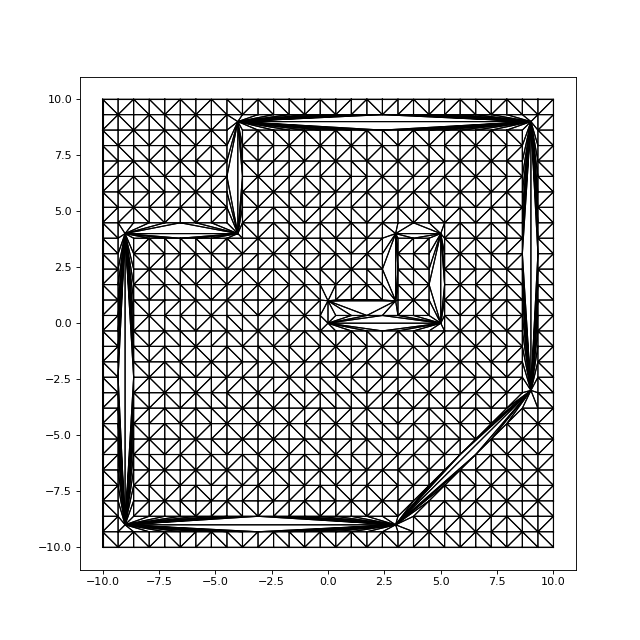 fig33.pdf
fig33.pdf
On effectue une réduction d'un niveau :
figure(figsize=(8,8))
maillage.subdiviserSegments(niveau=1)
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
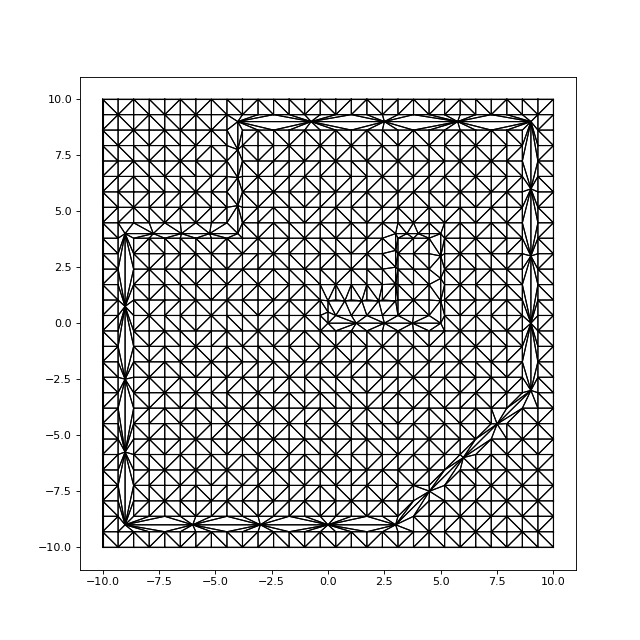 fig34.pdf
fig34.pdf
puis encore d'un niveau :
figure(figsize=(8,8))
maillage.subdiviserSegments(niveau=1)
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
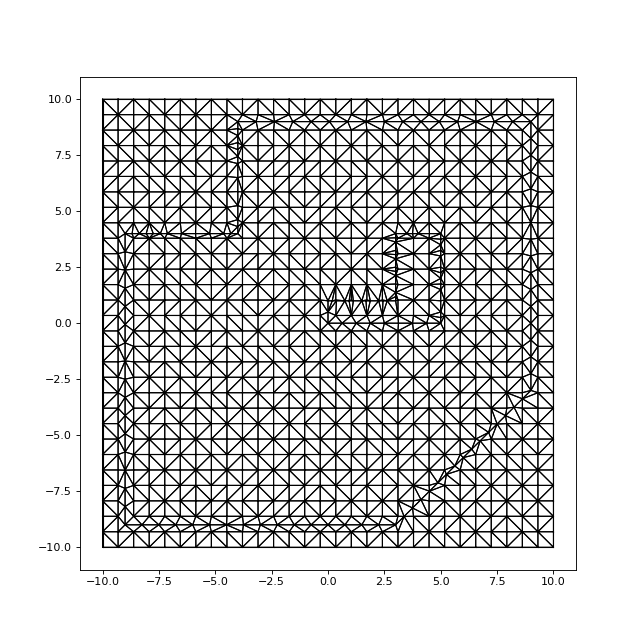 fig35.pdf
fig35.pdf
puis pour finir une réduction complète avant d'enlever les triangles externes ou internes aux polygones :
figure(figsize=(8,8))
maillage.subdiviserSegments()
maillage.retirerVirtuels()
maillage.enleverExterieurPolygones()
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
#invalid = maillage.verifierDelaunay()
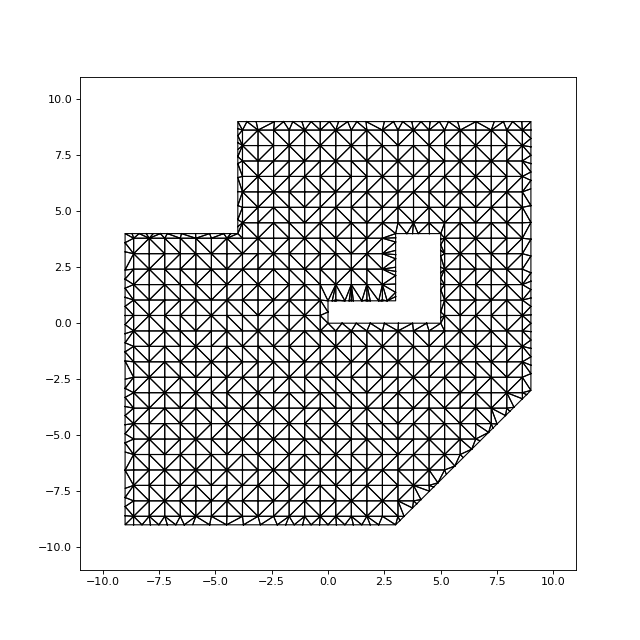 fig36.pdf
fig36.pdf
On constate sur cet exemple que la subdivision des segments des frontières peut conduire à des triangles dont le rapport est grand (à gauche du polygone dont l'intérieur est enlevé). Remarquons que la triangulation obtenue (avant retrait des triangles internes ou externes aux polygones) est Delaunay-C : il peut donc exister des triangles ajdacents à la frontière dont le disque ouvert circonscrit contient un nœud situé de l'autre côté de la frontière (par rapport à l'intérieur du triangle).
5.b. Suppression des triangles trop minces
Un triangle est dit trop mince lorsque l'angle est trop petit, c'est-à-dire lorsque rapport est trop grand. Un triangle trop mince peut être éliminé en introduisant un nouveau nœud placé au centre de son cercle circonscrit, comme le montre la figure suivante :
Figure pleine page{kind=link}
La distance entre le nouveau nœud et les autres est supérieure ou égale à R (puisque le disque ouvert circonscrit du triangle mince ne contient aucun nœud). En conséquence, les nouveaux triangles ne peuvent pas introduire de côtés de longueur inférieure à , la plus petite longueur du triangle mince.
Rappelons que dans la version modifiée de l'algorithme de Bowyer-Watson, le premier triangle de la cavité est celui qui contient le nœud, puis ceux dont le disque ouvert circonscrit contient le nœud sont recherchés récursivement par voisinage, sans traverser la frontière. Cela permet de s'assurer que les triangles enlevés sont tous du même côté de la frontière. Cependant, un cas pose problème. Supposons que le triangle mince que l'on veut retirer soit adjacent à la frontière et que le centre de son cercle circonscrit soit de l'autre côté de la frontière par rapport à l'intérieur du triangle.
Figure pleine page{kind=link}
Dans ce cas, le triangle mince n'est pas retiré puisqu'il se situe de l'autre côté de la frontière par rapport au triangle contenant le centre de son cercle circonscrit. Il peut être démontré que cette situation ne peut se produire que si le cercle diamétrique du segment contient un nœud autre que les deux sommets de ce segment. En conséquence, elle ne peut se produire après subdivision complète de la frontière. Il est néanmoins possible qu'un nouveau nœud soit introduit à l'intérieur du disque diamétrique d'un segment de la frontière. Dans ce cas, il faudra subdiviser ce segment. Nous adoptons la méthode suivante : à chaque fois qu'un nouveau nœud (centre du cercle circonscrit d'un triangle mince) est introduit, on recherche les segments dont le disque diamétrique contient le nœud et on les divise en deux segments.
La fonction segmentProche recherche les segments proches du nœud N et les subdivise en deux segments. La fonction supprimerTrianglesMinces repère tous les triangles qui ont un rapport plus grand qu'une valeur donnée tout en introduisant pour chacun d'eux un nouveau nœud situé au centre du cercle circonscrit. Le paramètre triangles fournit une liste de triangles à rechercher, par défaut tous les triangles. La fonction supprimerTousTrianglesMinces répète le processus jusqu'à ne plus trouver de triangles minces. À chaque itération, les triangles trop minces sont recherchés parmi les nouveaux triangles.
class Maillage10(Maillage9):
def __init__(self):
Maillage9.__init__(self)
def segmentProche(self,N):
for seg in self.segments:
N1 = seg[0]
N2 = seg[1]
xc = (N1.x+N2.x)/2
yc = (N1.y+N2.y)/2
r2 = ((N2.x-N1.x)**2+(N2.y-N1.y)**2)/4
if (N.x-xc)**2+(N.y-yc)**2 < r2:
Nc = Noeud(xc,yc)
self.ajouterNoeudSurSegment(Nc,seg)
self.segments.remove(seg)
self.segments.append([N1,Nc])
self.segments.append([Nc,N2])
def supprimerTrianglesMinces(self,rhomax,triangles = None):
if triangles == None: triangles = self.triangles
suppression = []
for tr in triangles:
if not(tr.virtuel) and tr.rapport > rhomax:
suppression.append(tr)
self.nouveauxTriangles = []
for tr in suppression:
N = Noeud(tr.xc,tr.yc)
if tr.present:
self.segmentProche(N)
self.nouveauxTriangles += self.nouvTr
if tr.present:
self.ajouterNoeud(N,tr)
self.nouveauxTriangles += self.nouvTr
return len(suppression)
def supprimerTousTrianglesMinces(self,rhomax,maxIter=10):
n = self.supprimerTrianglesMinces(rhomax)
while n and maxIter:
n = self.supprimerTrianglesMinces(rhomax,triangles=self.nouveauxTriangles)
maxIter -= 1
def rapportMax(self):
if self.triangles[0].virtuel:
rapport = 0
else:
rapport = self.triangles[0].rapport
for i in range(1,len(self.triangles)):
if not(self.triangles[i].virtuel) and self.triangles[i].rapport > rapport:
rapport = self.triangles[i].rapport
return rapport
def drawTrianglesMinces(self,rho,style):
for tr in self.triangles:
if not(tr.virtuel) and tr.rapport > rho:
tr.draw(style)
On reprend l'exemple précédent puis on trace en rouge tous les triangles qui ont un rapport supérieur à 1.3 :
N = 30
x = np.linspace(-10,10,N)
y = np.linspace(-10,10,N)
maillage = Maillage10()
noeuds = ListeNoeuds()
n1 = Noeud(x[0],y[0])
n2 = Noeud(x[1],y[0])
n3 = Noeud(x[0],y[1])
maillage.triangleInitial(n1,n2,n3)
for j in range(N):
for i in range(N):
if not((i,j) in [(0,0),(1,0),(0,1)]):
n = Noeud(x[i],y[j])
noeuds.append(n)
frontiere1 = []
frontiere1.append(noeuds.append(Noeud(0,0)))
frontiere1.append(noeuds.append(Noeud(5,0)))
frontiere1.append(noeuds.append(Noeud(5,4)))
frontiere1.append(noeuds.append(Noeud(3,4)))
frontiere1.append(noeuds.append(Noeud(3,1)))
frontiere1.append(noeuds.append(Noeud(0,1)))
polygone1 = Polygone(frontiere1,False)
frontiere2 = []
frontiere2.append(noeuds.append(Noeud(-9,-9)))
frontiere2.append(noeuds.append(Noeud(3,-9)))
frontiere2.append(noeuds.append(Noeud(9,-3)))
frontiere2.append(noeuds.append(Noeud(9,9)))
frontiere2.append(noeuds.append(Noeud(-4,9)))
frontiere2.append(noeuds.append(Noeud(-4,4)))
frontiere2.append(noeuds.append(Noeud(-9,4)))
polygone2 = Polygone(frontiere2,True)
maillage.ajouterListeNoeuds(noeuds.noeuds,len(noeuds.noeuds))
maillage.ajouterPolygone(polygone1)
maillage.ajouterPolygone(polygone2)
maillage.subdiviserSegments()
rhoMax = 1.3
rMax = maillage.rapportMax()
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawTrianglesMinces(rhoMax,"r-")
xlim(-11,11)
ylim(-11,11)
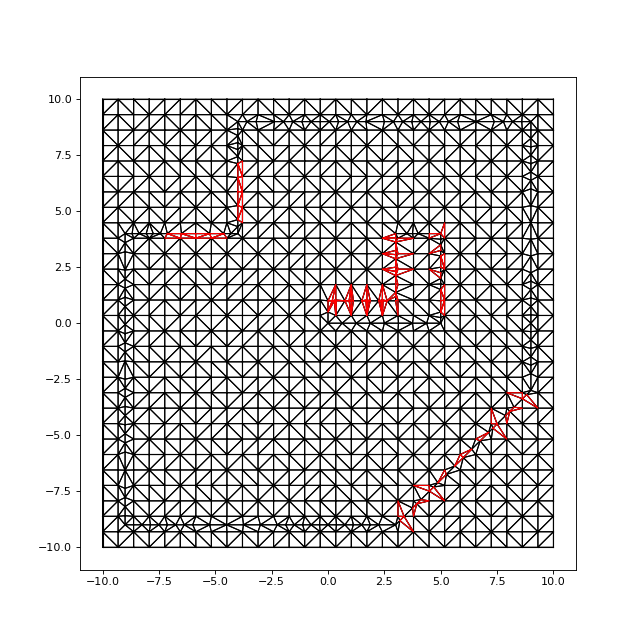 fig37.pdf
fig37.pdf
print(rMax) --> np.float64(7.0327220882107015)
Pour chaque triangle dont le rapport est supérieur à 1.3, on insère un nœud au centre du cercle circonscrit :
maillage.supprimerTrianglesMinces(rhoMax)
rMax = maillage.rapportMax()
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawSegments("r-")
xlim(-11,11)
ylim(-11,11)
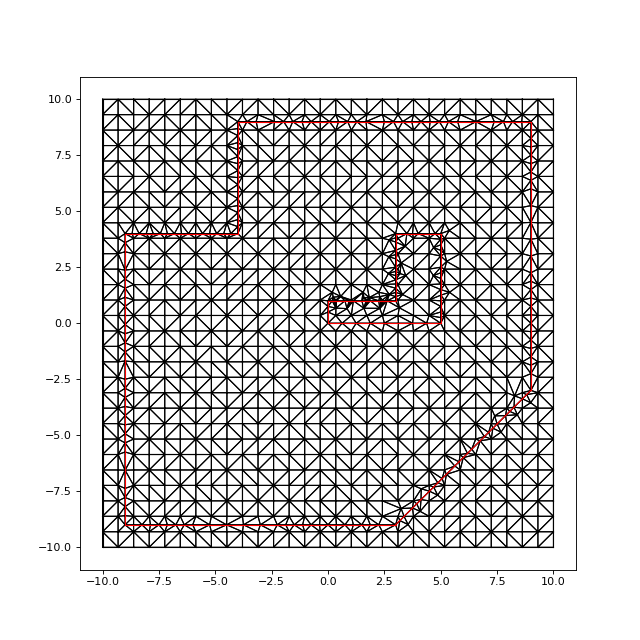 fig38.pdf
fig38.pdf
print(rMax) --> np.float64(5.757352445905608)
Le processus d'insertion peut être réitéré :
maillage.supprimerTrianglesMinces(rhoMax)
rMax = maillage.rapportMax()
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawSegments("r-")
xlim(-11,11)
ylim(-11,11)
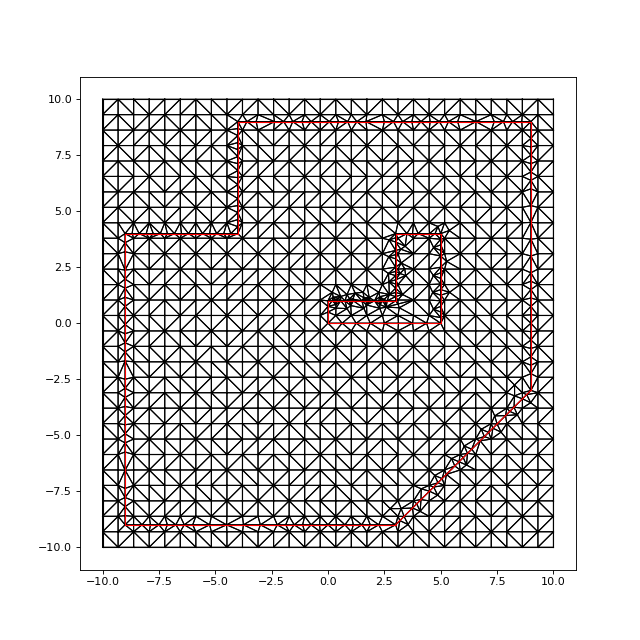 fig39.pdf
fig39.pdf
print(rMax) --> np.float64(2.723380220972411)
Si le rapport maximal est supérieur à et si la frontière ne comporte pas d'angle aigu, il est prouvé que le processus converge : après plusieurs cycles d'insertion, on obtient une triangulation dont tous les triangles ont un rapport inférieur à la valeur maximale. Dans le cas présent, il y a convergence bien que la valeur maximale soit inférieure à :
maillage.supprimerTousTrianglesMinces(rhoMax)
rMax = maillage.rapportMax()
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawSegments("r-")
xlim(-11,11)
ylim(-11,11)
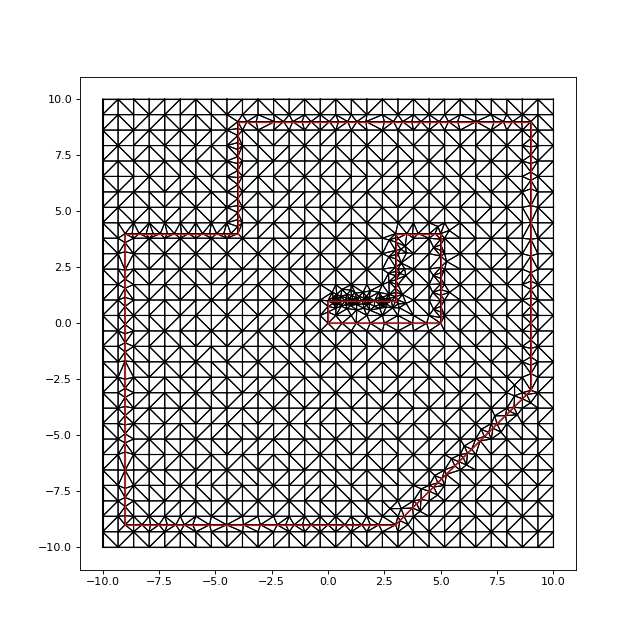 fig40.pdf
fig40.pdf
print(rMax) --> np.float64(1.299999999999991)
Voici une vue rapprochée de la frontière située dans le domaine :
figure(figsize=(8,8))
maillage.draw("k-")
maillage.drawSegments("r-")
xlim(-1,6)
ylim(-1,6)
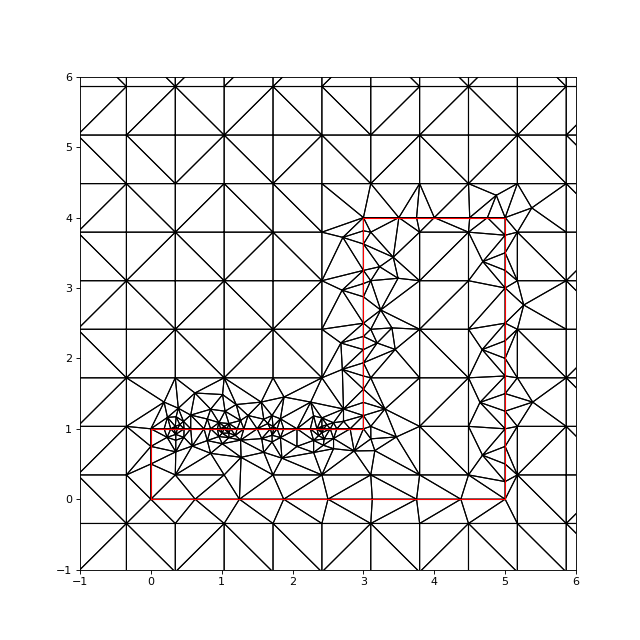 fig41.pdf
fig41.pdf
Les triangles très minces ont été éliminés mais des petits triangles ont été créés.
Pour finir, on retire les triangles internes ou externes aux polygones :
maillage.retirerVirtuels()
maillage.enleverExterieurPolygones()
figure(figsize=(8,8))
maillage.draw("k-")
xlim(-11,11)
ylim(-11,11)
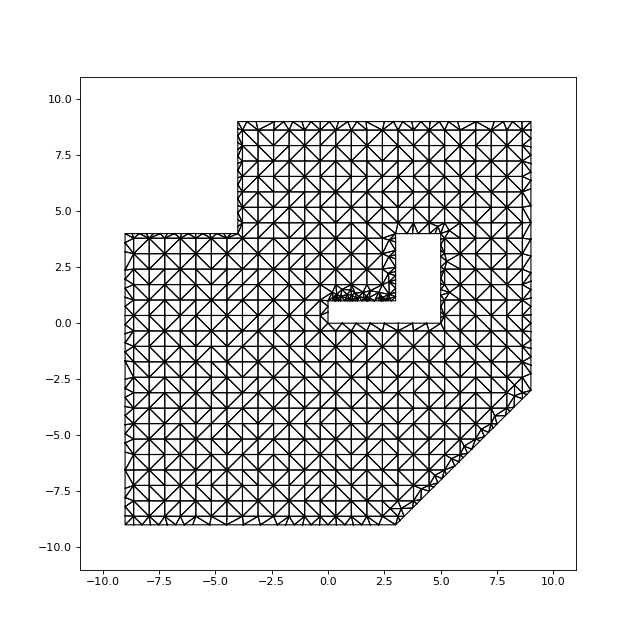 fig42.pdf
fig42.pdf
6. Annexes
6.a. Test d'intersection de deux triangles
Deux triangles ont une intersection si et seulement si un côté de l'un coupe un côté de l'autre. Il faut donc détecter l'intersection entre un segment AB et un segment CD. On commence par rechercher le point d'intersection des droites (AB) et (BC), dont les coordonnées sont solutions du système suivant :
Le déterminant de ce système est :
S'il est nul, les deux droites sont parallèles. C'est en particulier le cas lorsqu'on teste deux côtés communs de deux triangles. En conséquence, si le déterminant est nul les deux côtés ne se coupent pas. S'il est non nul, on obtient les coordonnées du point d'intersection avec la règle de Cramer :
Les deux côtés se coupent si et seulement si le point d'intersection M appartient aux deux côtés (ouverts) :
c'est-à-dire :
Si un des nœuds du segment AB est aussi un nœud du segment DC, par exemple si A=C, le test risque de conclure à une intersection à cause des erreurs d'arrondi, alors qu'il n'y a pas d'intersection dans ce cas (puisqu'on considère les côtés ouverts). Il faut donc exclure du test ce cas.