Toupie pesante à point fixe
1. Équations du mouvement
On suppose que la pointe de la toupie (point O) reste fixe par rapport au référentiel inertiel. En pratique, l'expérience est réalisée avec une liaison de type Cardan, c'est-à-dire un gyroscope dont le centre de masse est non confondu avec le point fixe du mouvement.
La mise en équation en vue d'une intégration numérique est faite selon la méthode exposée dans équations du mouvement d'un solide.
Soit Rs=(0xsyszs) le repère lié au solide coïncidant avec les axes propres du tenseur d'inertie au point O. L'axe Ozs est l'axe de symétrie de la toupie, de moment d'inertie I3. Les moments d'inertie I1 et I2 sont égaux.
Considérons tout d'abord le moment des forces de pesanteur au point O. Le centre de masse étant sur l'axe Ozs, on pose L=OG. Soit le repère d'espace R=(0xyz) (lié au référentiel) où Oz est la direction verticale. La matrice Q orthogonale définie l'orientation de la toupie. On a tout d'abord :
Le moment du poids s'écrit :
La matrice colonne correspondante est donc :
Pour écrire les équations d'Euler, nous avons besoin des composantes du moment dans le repère Rs du solide. Ceci est obtenu par la transformation suivante :
Pour modéliser les frottements dus à la rotation de la toupie, on introduit un moment dans la direction de l'axe de symétrie de la toupie :
3 paramètres constants interviennent dans les équations d'Euler :
Soit ω0 la vitesse angulaire initiale de la toupie, c'est-à-dire la dérivée par rapport au temps de ψ à t=0 (à ne pas confondre avec la valeur initiale de ωs3). Cette vitesse angulaire servira d'unité pour les variables ωk. Pour une toupie rapide, on a :
Écrivons les équations d'Euler avec Mathematica :
Q={{q11[t],q12[t],q13[t]},{q21[t],q22[t],q23[t]},{q31[t],q32[t],q33[t]}};
n={-q23[t],q13[t],0};
ns=Transpose[Q].n;
fs={0,0,omegaS3[t]};
euler={omegaS1'[t]==(1-r)*omegaS2[t]*omegaS3[t]+a*r*ns[[1]]-b*r*fs[[1]],
omegaS2'[t]==(r-1)*omegaS3[t]*omegaS1[t]+a*r*ns[[2]]-b*r*fs[[2]],
omegaS3'[t]==a*ns[[3]]-b*fs[[3]]}
Bien que la dernière équation soit directement intégrable, on la laissera dans le système pour plus de généralité.
Les équations différentielles vérifiées par les composantes de la transformation orthogonale :
OmegaS={{0,-omegaS3[t],omegaS2[t]},{omegaS3[t],0,-omegaS1[t]},{-omegaS2[t],omegaS1[t],0}};
d = Q.OmegaS;
dQ = {q11'[t]==d[[1,1]],q12'[t]==d[[1,2]],q13'[t]==d[[1,3]],
q21'[t]==d[[2,1]],q22'[t]==d[[2,2]],q23'[t]==d[[2,3]],
q31'[t]==d[[3,1]],q32'[t]==d[[3,2]],q33'[t]==d[[3,3]]}
Les conditions initiales sont données à l'aide des angles d'Euler :
ωp est la vitesse de précession initiale. Les conditions initiales doivent être exprimées pour les composantes du vecteur vitesse angulaire sur les axes de Rs et pour les éléments de la matrice Q :
Q0=RotationMatrix[phi,{0,0,1}].RotationMatrix[theta,{1,0,0}].RotationMatrix[psi,{0,0,1}];
dQ0 = D[Q0/.{phi->phi[t],theta->theta[t],psi->psi[t]},t];
Qinit = Q0/.{phi->0,theta->theta0,psi->0};
dQinit = dQ0/.{phi'[t]->omegaP,psi'[t]->omega0,theta'[t]->0,phi[t]->0,
theta[t]->theta0,psi[t]->0};
OmegaS = Transpose[Qinit].dQinit;
init = {omegaS1[0]==OmegaS[[3,2]],omegaS2[0]==OmegaS[[1,3]],omegaS3[0]==OmegaS[[2,1]],
q11[0]==Qinit[[1,1]],q12[0]==Qinit[[1,2]],q13[0]==Qinit[[1,3]],
q21[0]==Qinit[[2,1]],q22[0]==Qinit[[2,2]],q23[0]==Qinit[[2,3]],
q31[0]==Qinit[[3,1]],q32[0]==Qinit[[3,2]],q33[0]==Qinit[[3,3]]}
Le système de 12 équations différentielles à intégrer est finalement :
equations=Join[euler,dQ]
2. Intégration avec Mathematica
2.a. Toupie conservative
Les frottements sont négligés et la vitesse de précession initiale est nulle. L'unité de temps est la période de rotation de la toupie.
systeme=Join[equations,init]/.{r->0.2,a->N[2*Pi*0.1],b->0,omegaP->0,omega0->N[2*Pi],
theta0->N[30*Pi/180]}
On effectue l'intégration numérique :
tmax=500;
variables={omegaS1,omegaS2,omegaS3,q11,q12,q13,q21,q22,q23,q31,q32,q33};
solution = NDSolve[systeme,variables,{t,0,tmax},AccuracyGoal->5,
Method->'ImplicitRungeKutta',MaxSteps->Infinity]
Tout d'abord, on vérifie (partiellement) l'orthogonalité de Q :
Plot[q11[t]*q11[t]+q21[t]*q21[t]+q31[t]*q31[t]/.solution,{t,0,tmax},
PlotRange->{{0,tmax},{0.99,1.01}},AxesLabel->{'t','q11^2+q21^2+q31^2'}]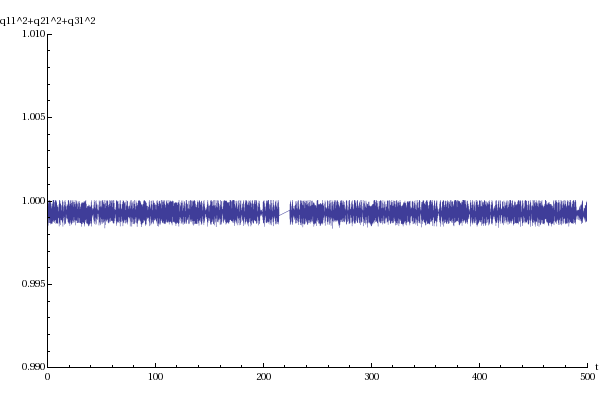 plotC.pdf
plotC.pdf
Les variations sont de l'ordre de 1 pour 1000.
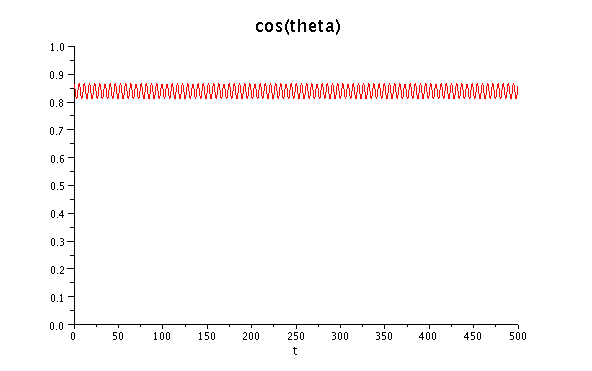
Traçons le cosinus l'angle θ(t) :
Plot[q33[t]/.solution,{t,0,tmax},
PlotRange->{{0,tmax},{0,1}},AxesLabel->{'t','cos(theta)'},PlotPoints->10^4]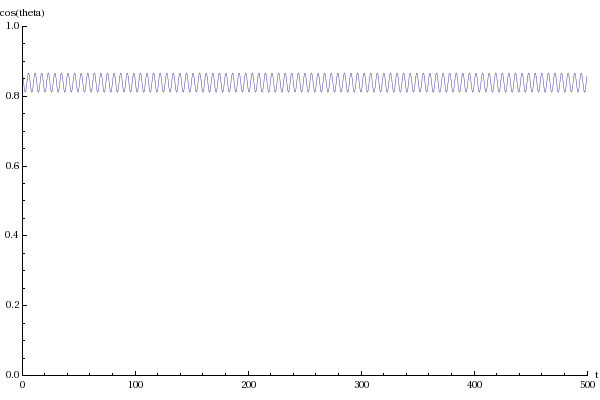 plotA.pdf
plotA.pdf
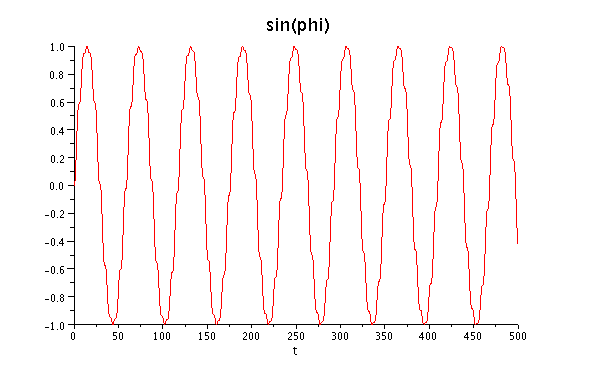
On constate un mouvement de nutation. On trace le sinus de l'angle de précession ϕ(t) :
Plot[q13[t]/Sqrt[1-q33[t]*q33[t]]/.solution,{t,0,tmax},
PlotRange->{{0,tmax},{-1,1}},AxesLabel->{'t','sin(phi)'},PlotPoints->10^4]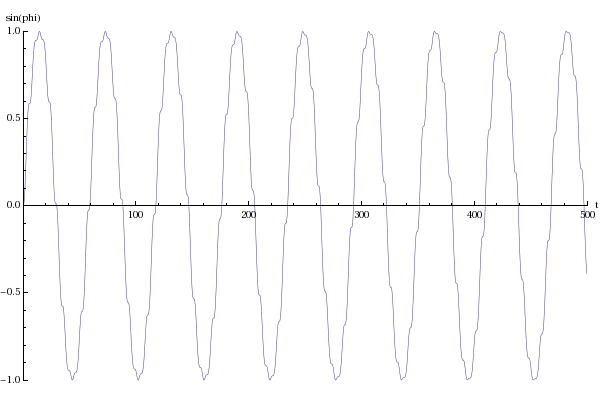 plotB.pdf
plotB.pdf
Cette courbe montre le mouvement de précession.
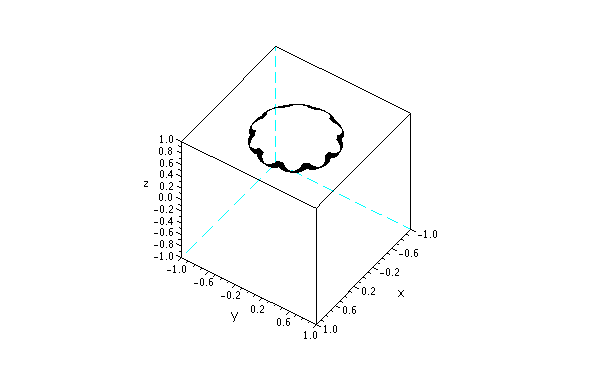
Représentation dans l'espace d'un point de l'axe de la toupie :
ParametricPlot3D[{q13[t],q23[t],q33[t]}/.solution,{t,0,100},PlotRange->{{-1,1},{-1,1},{-1,1}}]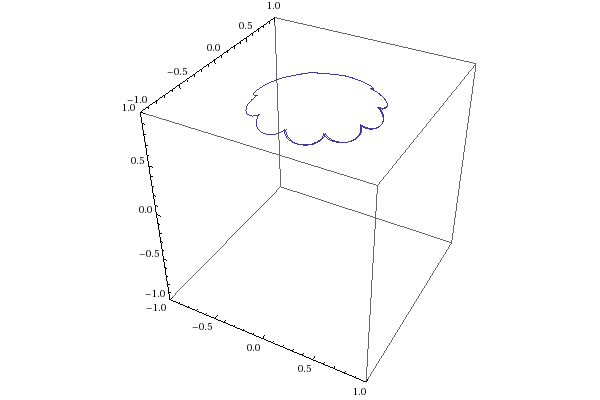 plotG.pdf
plotG.pdf
2.b. Toupie avec frottement
On reprend les mêmes paramètres avec en plus un léger couple de frottement sur l'axe de la toupie :
systeme=Join[equations,init]/.{r->0.2,a->N[2*Pi*0.1],b->0.001,omegaP->0,
omega0->N[2*Pi],theta0->N[30*Pi/180]}
tmax=1000;
solution = NDSolve[systeme,variables,{t,0,tmax},AccuracyGoal->5,
Method->'ImplicitRungeKutta',MaxSteps->Infinity]
Plot[q11[t]*q11[t]+q21[t]*q21[t]+q31[t]*q31[t]/.solution,{t,0,tmax},
PlotRange->{{0,tmax},{0.99,1.01}},AxesLabel->{'t','q11^2+q21^2+q31^2'}]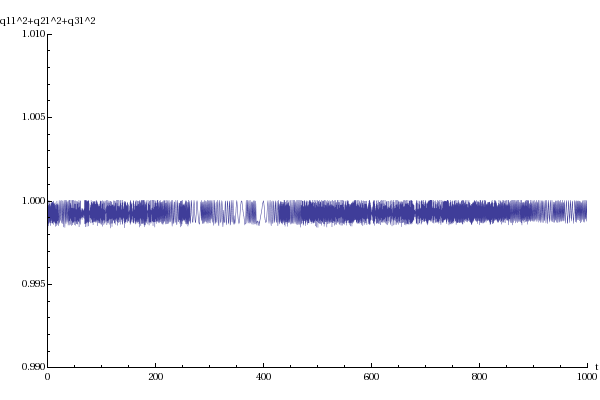 plotD.pdf
plotD.pdf
Plot[q33[t]/.solution,{t,0,tmax},
PlotRange->{{0,tmax},{0,1}},AxesLabel->{'t','cos(theta)'},PlotPoints->10^4]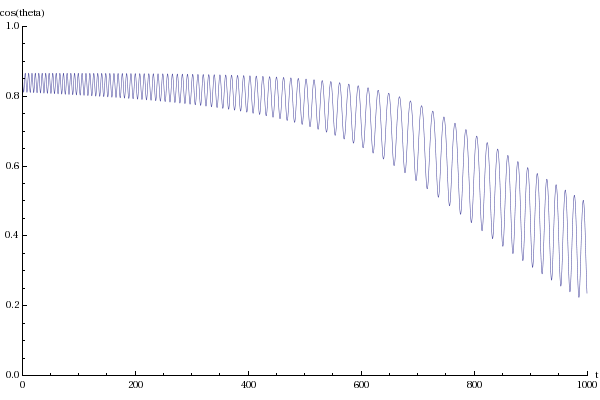 plotE.pdf
plotE.pdf
Plot[q13[t]/Sqrt[1-q33[t]*q33[t]]/.solution,{t,0,tmax},
PlotRange->{{0,tmax},{-1,1}},AxesLabel->{'t','sin(phi)'},PlotPoints->10^4]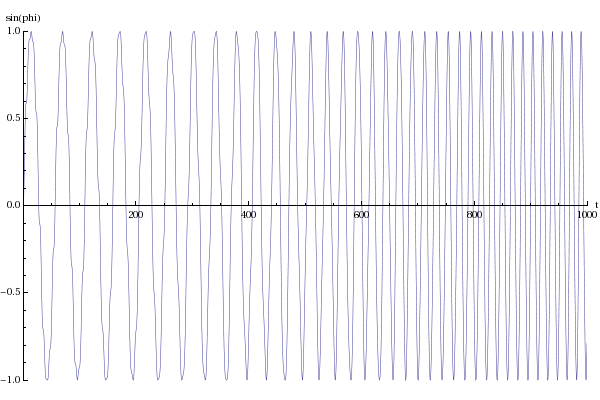 plotF.pdf
plotF.pdf
3. Intégration avec Scilab
La fonction suivante effectue l'intégration numérique pour des paramètres et des conditions initiales donnés :
function [t,y]=solution(r,a,b,omegaP,omega0,theta0,tmax,te),
c=cos(theta0),
s=sin(theta0),
function deriv=systeme(t,y),
deriv(1)=(1-r)*y(2)*y(3)+a*r*(y(6)*y(7)-y(4)*y(9)), // omegaS1
deriv(2)=(r-1)*y(1)*y(3)+a*r*(y(6)*y(8)-y(5)*y(9)), // omegaS2
deriv(3)=-b*y(3), // omegaS3
deriv(4)=y(3)*y(5)-y(2)*y(6), // q11
deriv(5)=y(1)*y(6)-y(3)*y(4), // q12
deriv(6)=y(2)*y(4)-y(1)*y(5), // q13
deriv(7)=y(3)*y(8)-y(2)*y(9), // q21
deriv(8)=y(1)*y(9)-y(3)*y(7), // q22
deriv(9)=y(2)*y(7)-y(1)*y(8), // q23
deriv(10)=y(3)*y(11)-y(2)*y(12), // q31
deriv(11)=y(1)*y(12)-y(3)*y(10), // q32
deriv(12)=y(2)*y(10)-y(1)*y(11), // q33
endfunction
init=[0;omegaP*s;omega0+omegaP*c;1;0;0;0;c;-s;0;s;c];
t=[0:te:tmax];
tolA=1d-7;
tolR=1d-10;
y=ode(init,0,t,tolR,tolA,systeme);
endfunction
La fonction suivante calcule les différentes quantités à tracer :
function [a1,a2,a3]=calcul(y) a1 = y(1,:); a2 = a1 a3 = a1; s=size(a1); for i=1:s(2), a1(i)=y(4,i)*y(4,i)+y(7,i)*y(7,i)+y(10,i)*y(10,i), a2(i)=y(12,i), a3(i)=y(6,i)/sqrt(1-y(12,i)*y(12,i)), end; endfunction
Voici par exemple la toupie sans frottements déjà considérée plus haut :
tmax=500; [t,y]=solution(0.2,2*%pi*0.1,0,0,2*%pi,30*%pi/180,tmax,0.1); [a1,a2,a3]=calcul(y);
plotH=scf();
plot2d(t,a1,style=5,rect=[0,0.99,tmax,1.01]);
xtitle('q11^2+q21^2+q22^2','t','');
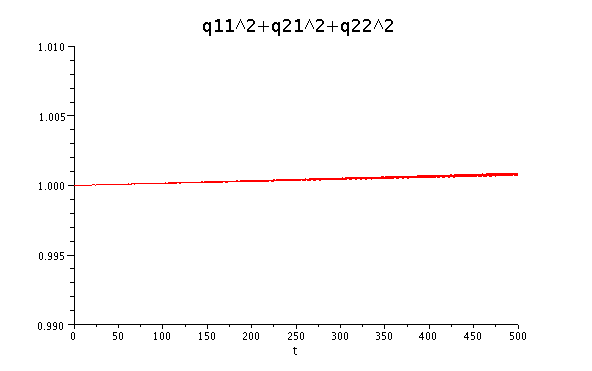 plotH.pdf
plotH.pdf
plotI=scf();
plot2d(t,a2,style=5,rect=[0,0,tmax,1]);
xtitle('cos(theta)','t','');
 plotI.pdf
plotI.pdf
plotJ=scf();
plot2d(t,a3,style=5,rect=[0,-1,tmax,1]);
xtitle('sin(phi)','t','');
 plotJ.pdf
plotJ.pdf
plotK=scf(); param3d(y(6,:),y(9,:),y(12,:),35,45,'x@y@z',[3,4],[-1,1,-1,1,-1,1]);
 plotK.pdf
plotK.pdf