Transistor MOSFET de puissance
1. Introduction
Le transistor MOSFET (Metal Oxyde Semiconductor Field Effect Transistor) enrichi à grille isolée est utilisé en électronique de puissance pour alimenter des charges en commutation ([1],[2]). Les applications sont nombreuses : alimentation à découpage, onduleur, alimentation de moteurs, ampli audio de classe D, etc.
Ce document montre comment faire fonctionner un transistor MOSFET de puissance avec un signal de commande MLI (modulation de largeur d'impulsion). On considère tout d'abord un hacheur un quadrant réalisé avec un seul transistor MOSFET, avant d'aborder le cas du hacheur deux quadrants, réalisé avec deux transistors en montage demi-pont.
2. Hacheur un quadrant
2.a. Montage d'étude
Le montage suivant permet d'étudier la commutation d'un MOSFET.
Figure pleine page{kind=link}
La charge est une résistance de 6,8 Ω (résistance bobinée de puissance 25 W) alimentée par une alimentation de laboratoire régulée en tension (12 V).
Le générateur de signaux délivre une tension carrée (de rapport cyclique 1/2) prenant les valeurs 0 et 12 V. Lorsque la grille G est à 12 V par rapport à la source S, le transistor est à l'état passant. Le dipôle Drain-Source est alors équivalent à une résistance RDSON de l'ordre de 1 Ω. Lorsque la tension grille-source est inférieure à un seuil (en général de l'ordre de 5 V), le transistor est bloqué et la résistance Drain-Source est pratiquement infinie.
Le hacheur ainsi réalisé est dit à un quadrant car la tension aux bornes de la charge est toujours positive et le courant dans la charge est toujours positif (pour une charge résistive).
La résistance R est nécessaire car le dipôle grille-source est équivalent à une capacité (de l'ordre de plusieurs centaines de pF). Elle permet de limiter le courant lors de la charge de cette capacité. Le courant dans R est obtenu à l'oscilloscope via un amplificateur différentiel.
Les tests ci-dessous sont fait avec un MOSFET Infineon IPA50R500 (la diode est incorporée). Le courant de drain continu maximal est IDmax=5,4 A, ce qui suffit largement pour la charge de 6,8 Ω alimentée sous 12 V. Pendant les phases de conduction du transistor, le courant dans la charge est de 1,8 A. La résistance RDSON=0,5 Ω pour VGS=13 V. La tension grille source de doit pas dépasser 20 V. Voici les courbes courant-tension drain-source pour ce transistor :
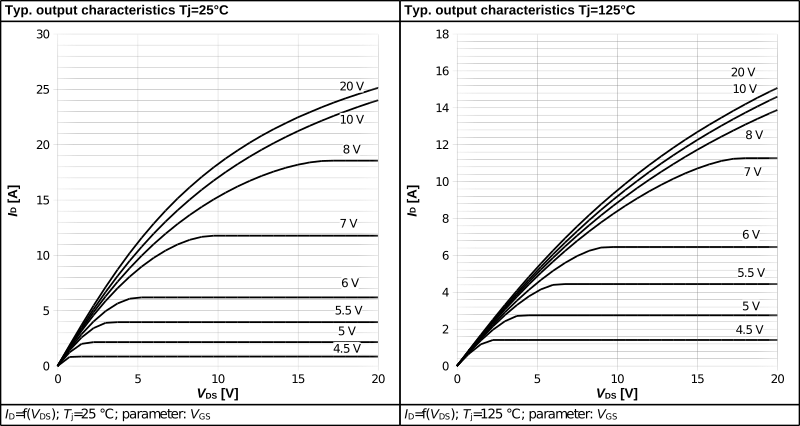
Pour un courant de drain de 5 A, il faut appliquer une tension grille source d'au moins 7 V afin d'être dans la zone résistive. Notre montage applique une tension de 12 V, largement suffisante.
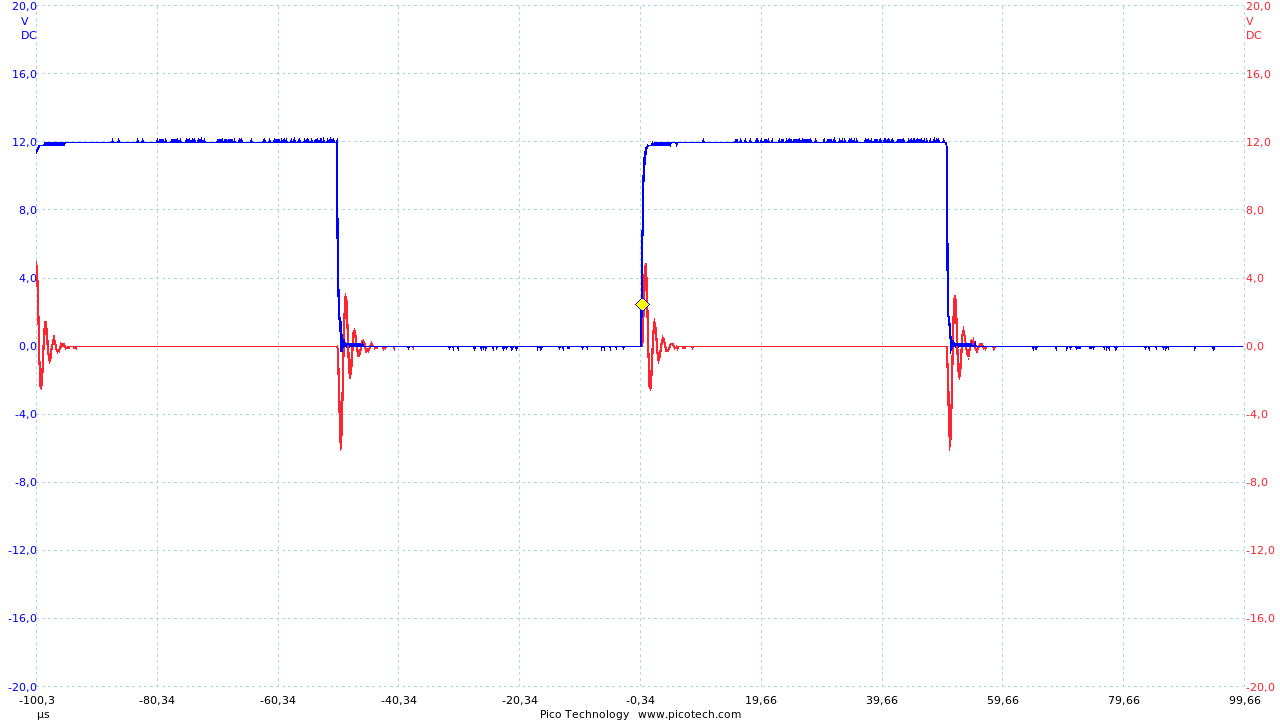
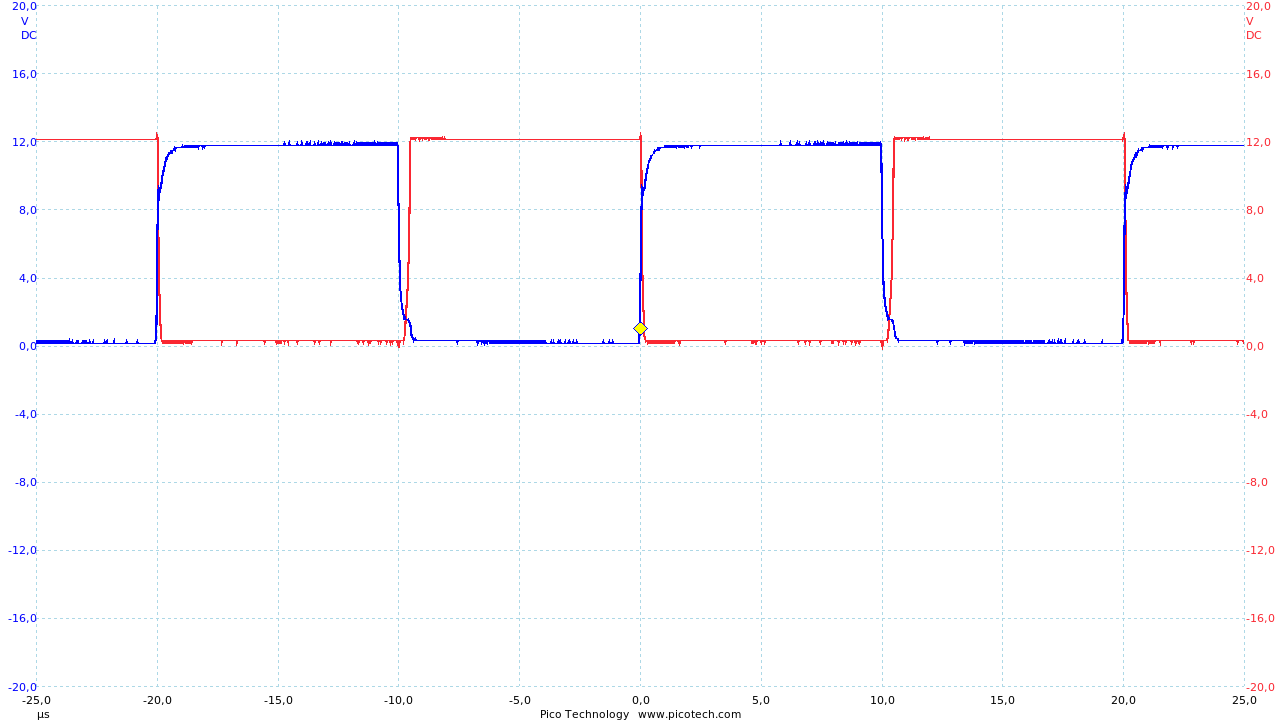
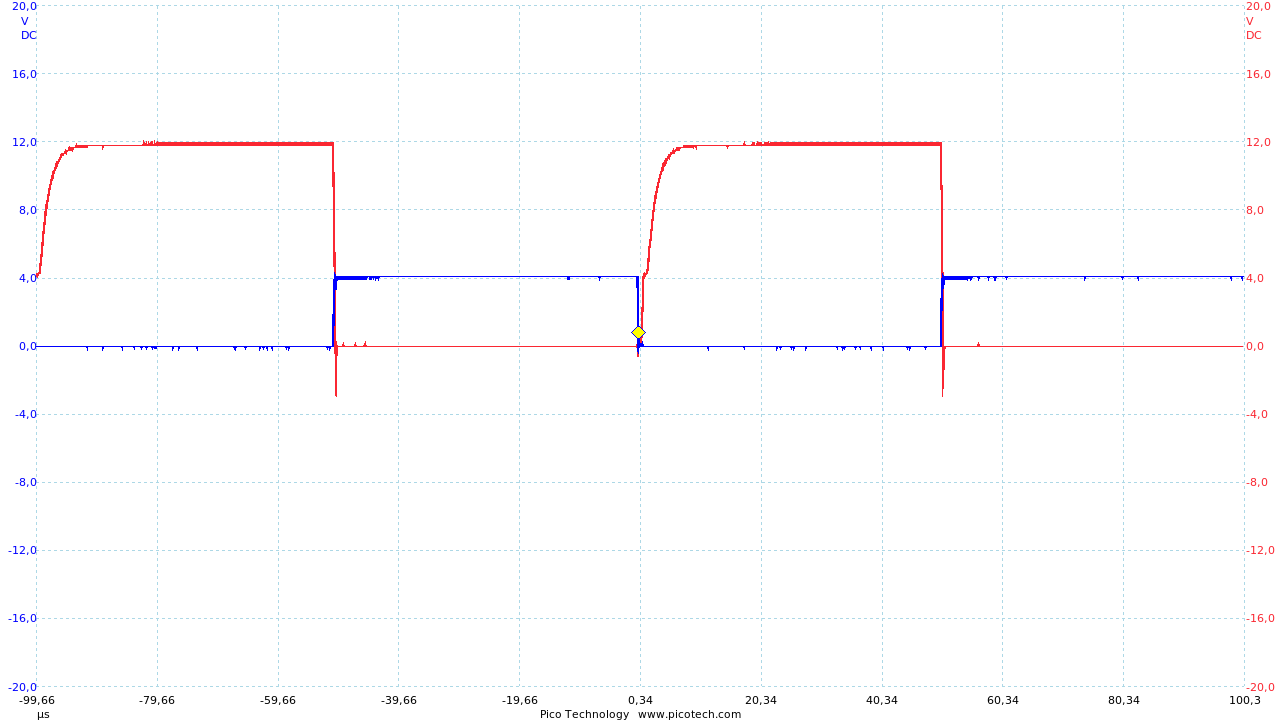
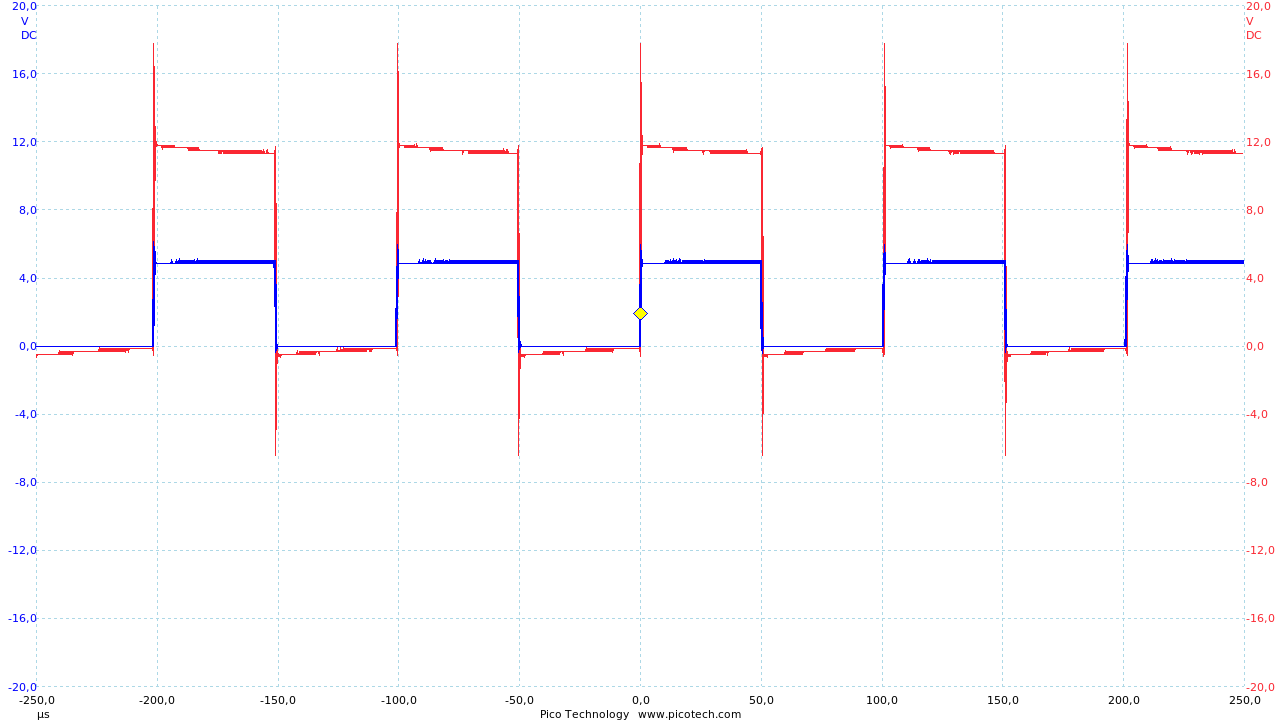
On commence par des tests à une fréquence de 10 kHz. Pour une résistance R=1000 Ω voici la tension de commande V1 (en sortie du GBF) en bleu et la tension VD :
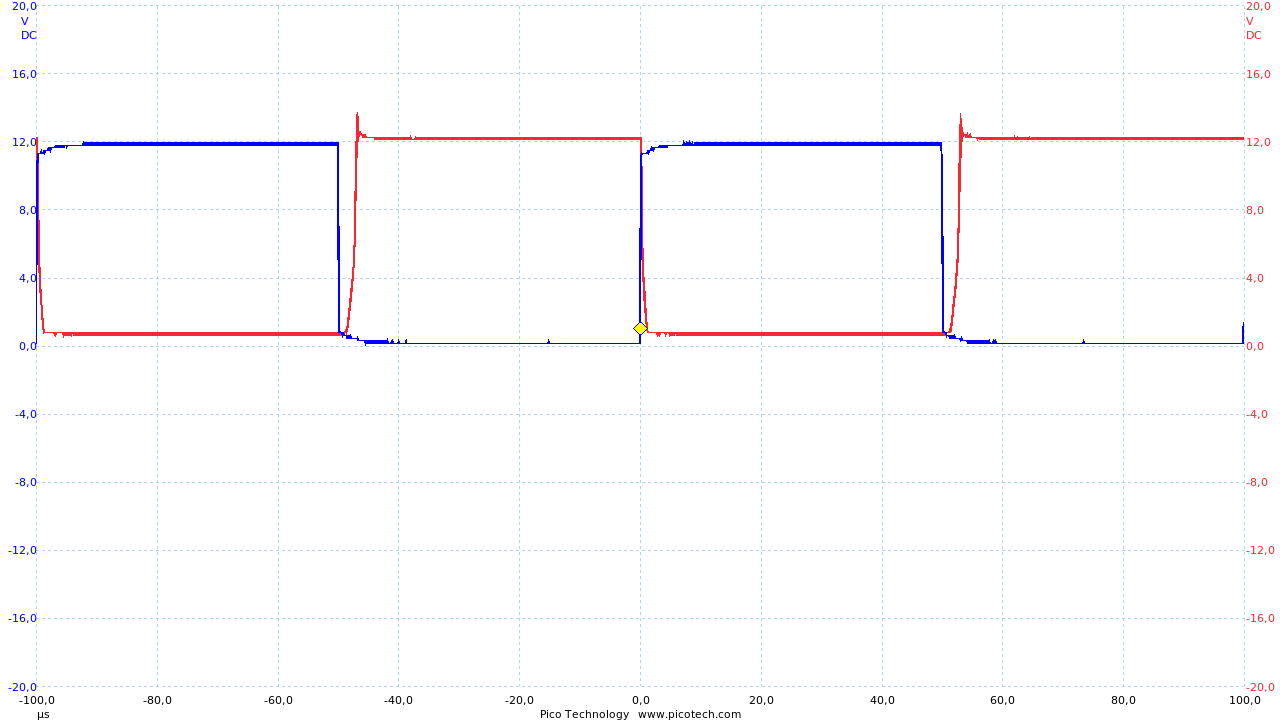
On voit que le temps de blocage du transistor n'est pas négligeable, de l'ordre de 10 μs. La commutation est néanmoins satisfaisante pour cette fréquence. Lorsque le transistor est passant, la résistance RDSON=0,5 Ω donne une petite tension VD=0,8 V, qui augmente si la résistance de charge diminue.
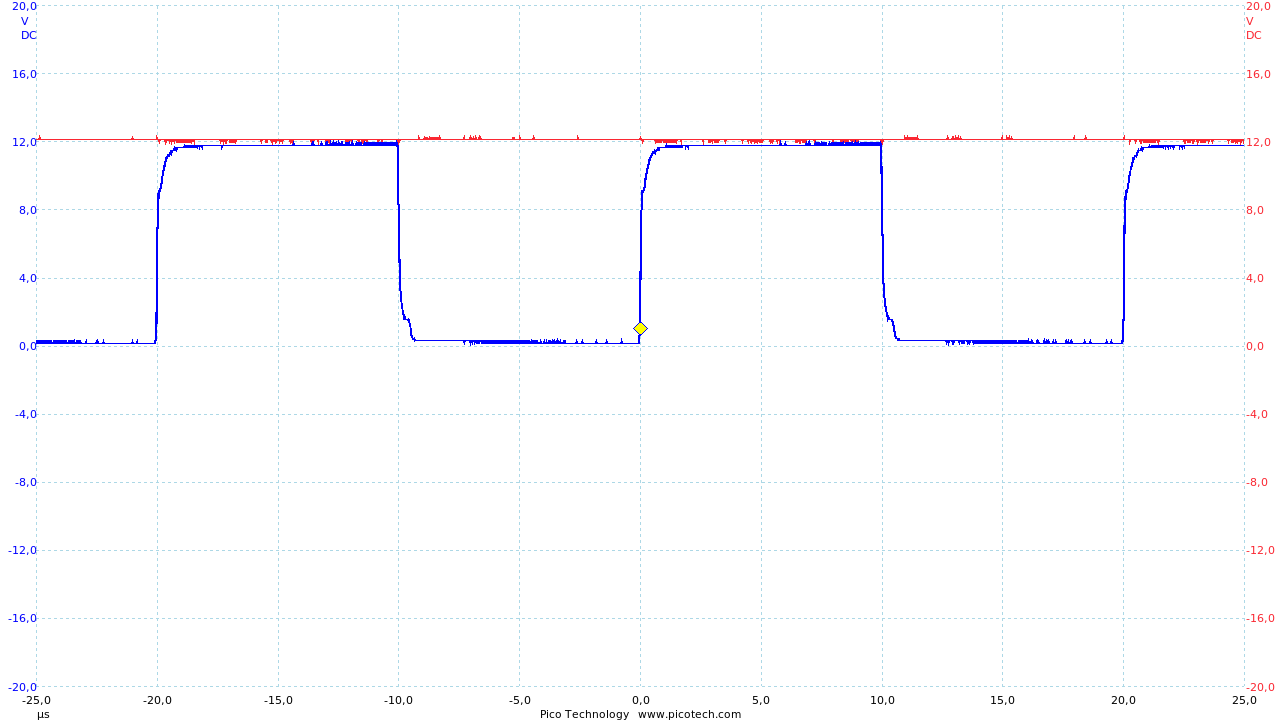
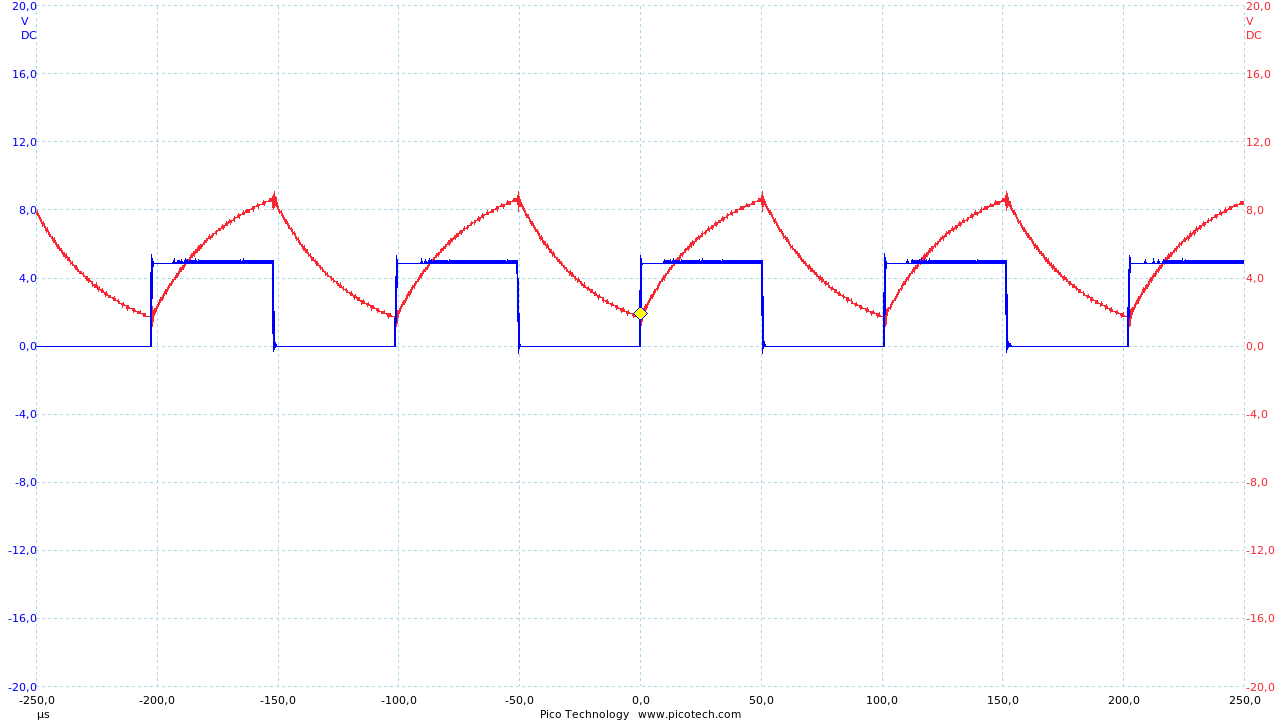
Voici la tension de commande (en bleu) et la tension Ri (en rouge) :
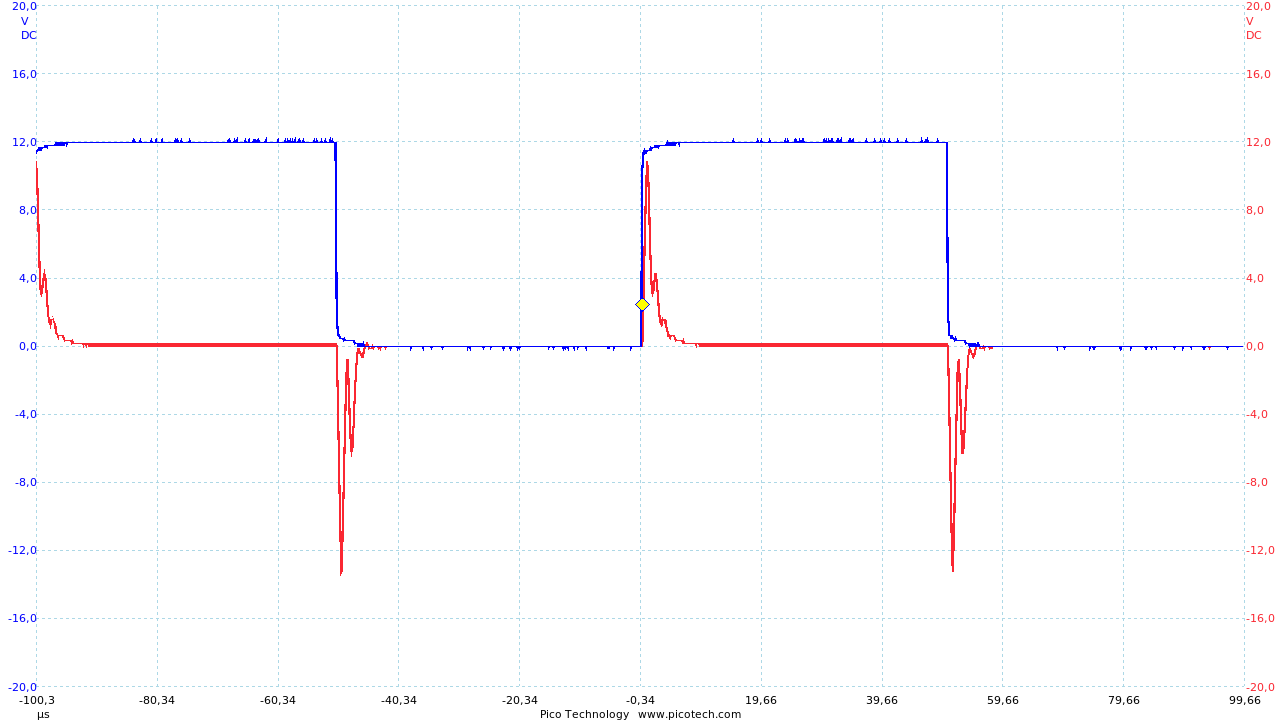
On voit le pic de courant lors de la charge et de la décharge de la capacité du transistor, avec un courant maximal de 14 mA. Si l'on veut piloter la grille avec un circuit logique CMOS de la famille 4000, ce courant est trop grand. On est alors amené à augmenter R. Voici les signaux pour R=2200 Ω :
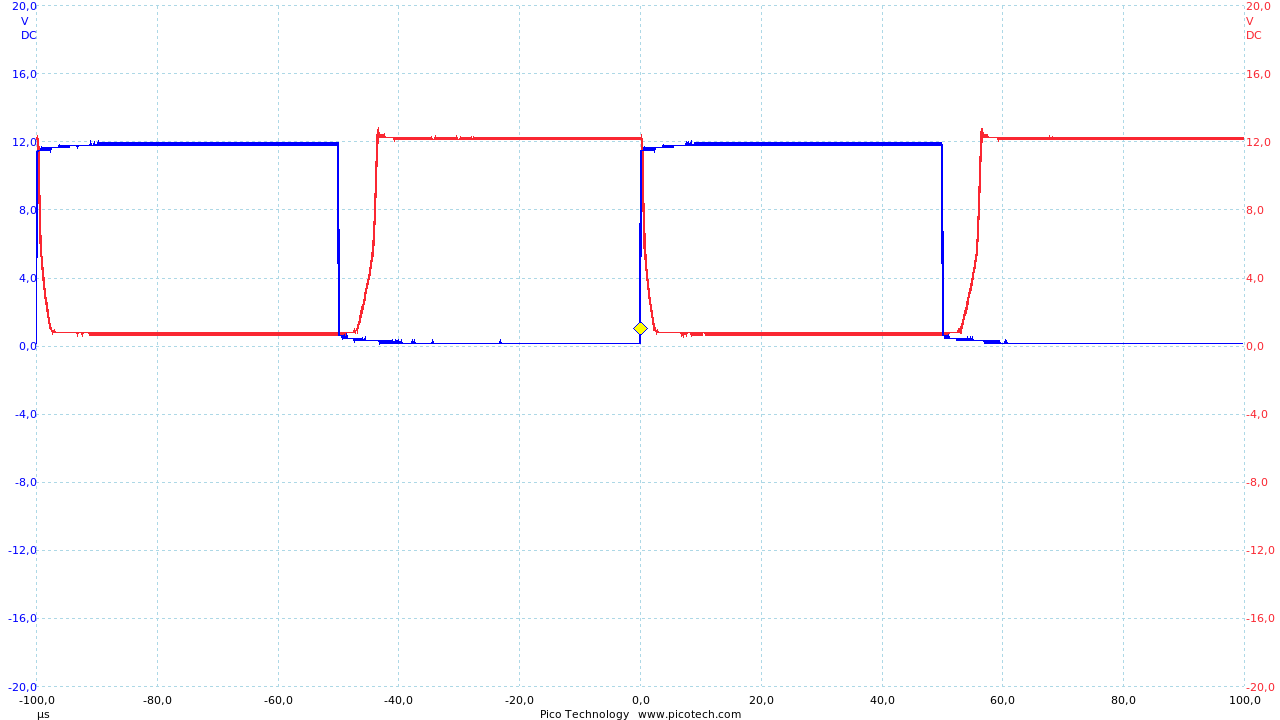
Le maximum du courant de commande est de 6 mA, ce qui est acceptable pour un circuit logique. En revanche, le temps de réponse est doublé. La commutation est encore correcte, mais il n'y a plus de marge pour augmenter la fréquence ou pour un rapport cyclique proche de 0 ou 1.
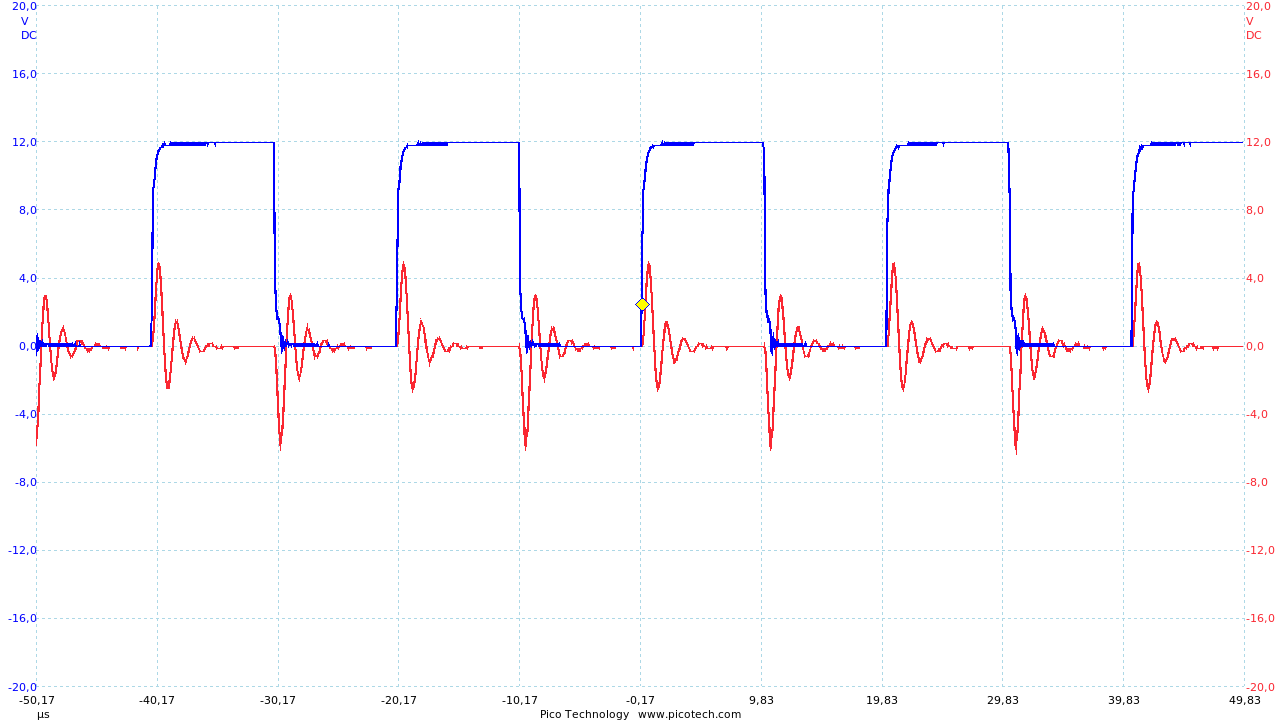
Pour réduire le temps de blocage, il faut réduire R, ce qui nécessite un circuit de commande capable de délivrer un plus grand courant. Voici les signaux pour R=470 Ω :
Le courant maximal est de 20 mA. On remarque la présence d'oscillations de VD (avec une forte surtension) juste après le passage à l'état bloquant du transistor. Voici le résultat pour R=100 Ω :
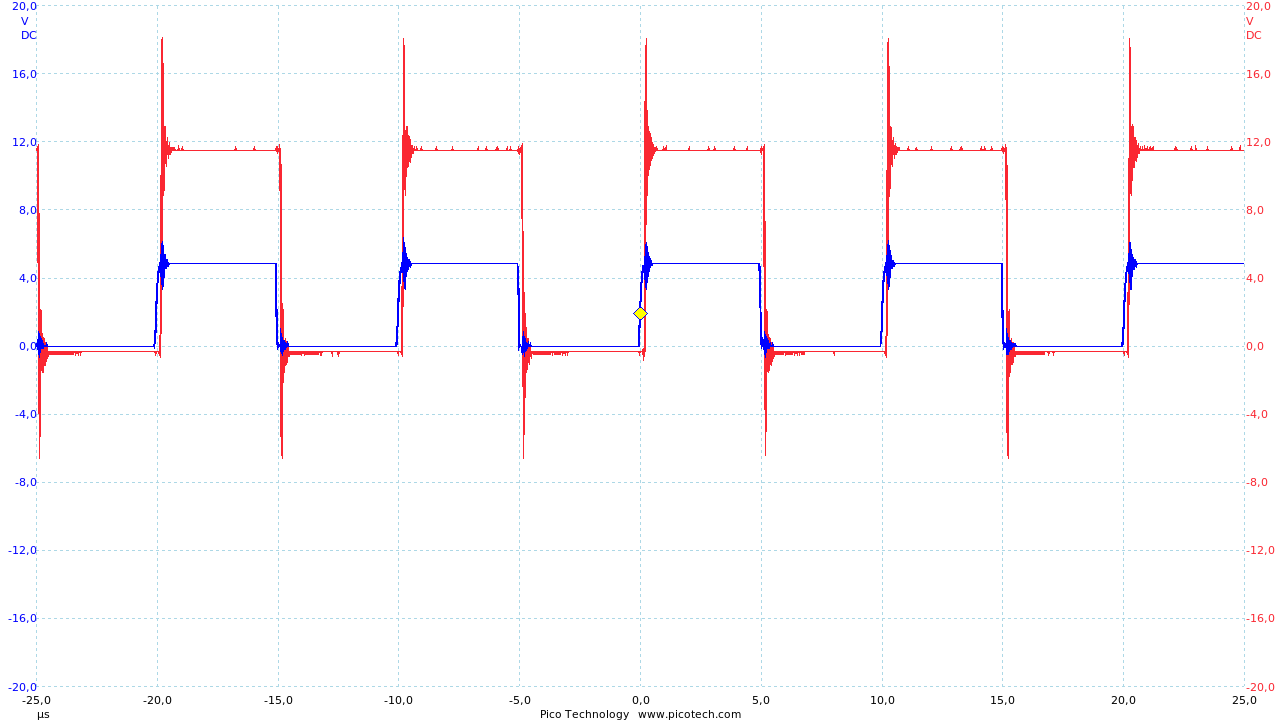
Le courant maximal est de l'ordre de 50 mA. Le temps de commutation est très court et on peut donc augmenter la fréquence. Voici les signaux pour une fréquence de 50 kHz :
Les oscillations de VD sont très importantes, avec une surtension dépassant 20 V. Il est aussi important de regarder la tension en sortie de l'alimentation :
La présence du condensateur de découplage de 100 μF en entrée du circuit permet de maintenir un taux d'ondulation faible.
Les oscillations de VD sont probablement causées par un couplage entre l'inductance de la charge (résistance bobinée) avec la capacité drain-source du transistor (de l'ordre de 10 pF). Pour vérifier cette hypothèse, on fait une simulation LTSpice avec un modèle de transistor fourni par le fabricant (Infineon) :
Figure pleine page{kind=link}
Vs N003 0 12
Rc N003 N002 6
V1 N004 0 PULSE(0 12 0 0 0 50u 100u 10)
Lc N002 N001 1u
XU1 N001 N004 0 IPA50R500CE_L0
.tran 0 500u 0 0.1u
.lib Infineon-MOSFET.lib
.backanno
.end
Voici le tracé de la tension de drain :
import numpy
from matplotlib.pyplot import *
data = numpy.loadtxt("commandeMOSFET-sourceV.txt2",skiprows=1,unpack=True)
t=data[0]
VD=data[1]
figure()
plot(t,VD)
xlabel("t (s)")
ylabel("VD (V)")
axis([1e-4,3e-4,0,30])
grid()
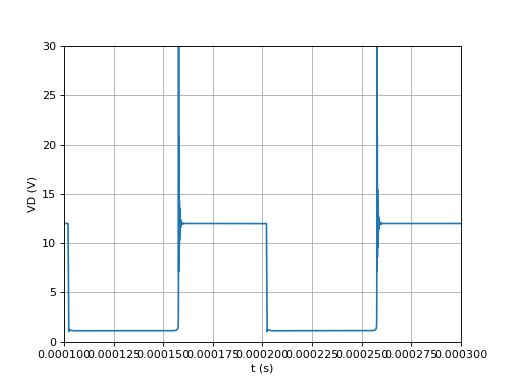 figA.pdf
figA.pdf
et un détail :
axis([1.55e-4,1.6e-4,0,30])
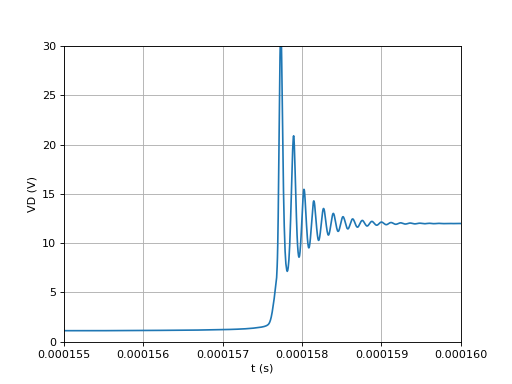 figA1.pdf
figA1.pdf
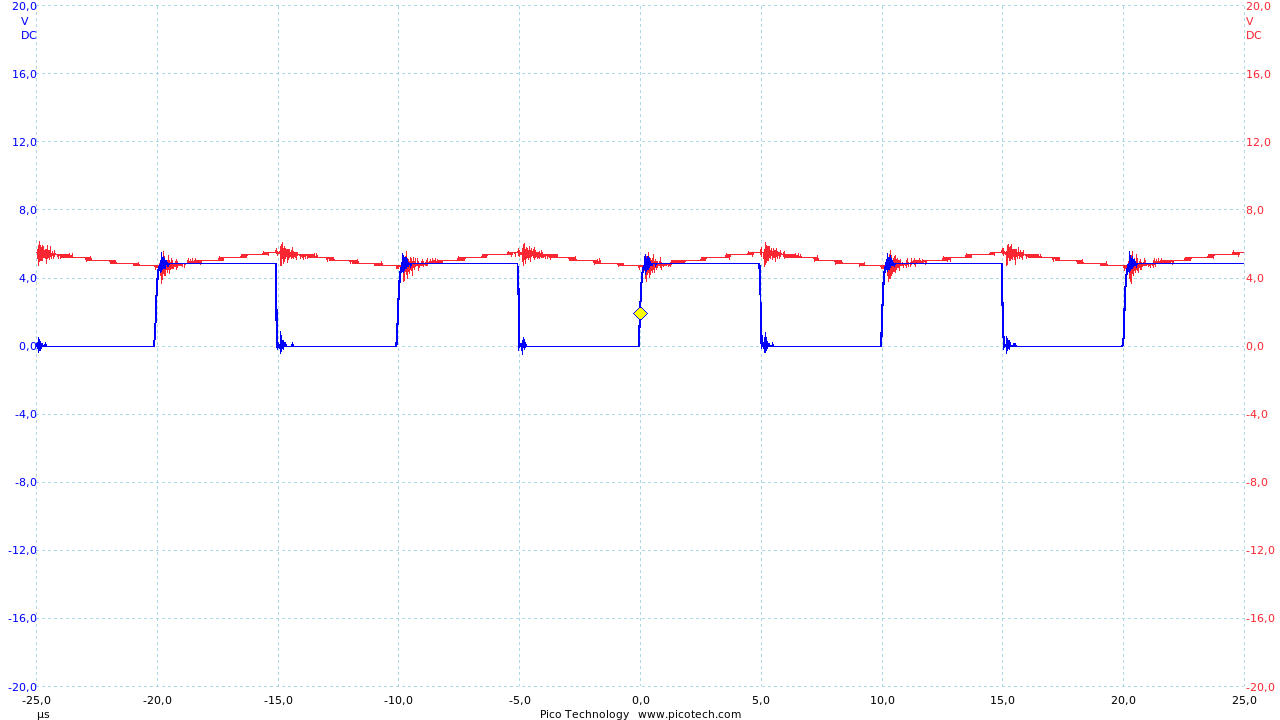
On peut aussi faire les tests avec une résistance moins inductive prévue pour les commutations rapides (Rc=18 Ω). Voici la tension de commande (bleu) et la tension de drain (rouge) :
et la tension de commande avec la tension en sortie de l'alimentation :
Avec cette charge très faiblement inductive, il n'y a plus d'oscillations (le condensateur de découplage est nécessaire).
2.b. Commande avec un transistor bipolaire
Pour commander un hacheur un quadrant à partir d'une sortie TTL d'un microcontrôleur (5 V ou 3,3 V), on peut utiliser un transistor bipolaire NPN, si la fréquence de commutation n'excède pas 10 kHz :
Figure pleine page{kind=link}
L'inconvénient de cette commande est le courant élevé qui circule dans R pendant toute la phase de conduction du transistor NPN. Par exemple, pour R=100 Ω, la puissance dissipée dans cette résistance est de 0,36 W et contribue à une perte d'efficacité. Pour R=1000 Ω, la puissance dissipée dans R est négligeable.
La source de tension Vc sert à polariser la grille. Sa valeur est comprise entre 12 et 20 V. La source de tension Vs sert à alimenter la charge et sa valeur peut être de plusieurs dizaines à plusieurs centaines de volts (suivant le transistor et la charge). Cette dernière doit être réalisée par une alimentation assez puissante pour la charge utilisée. En pratique, on peut utiliser la même alimentation pour Vc et Vs, à condition de ne pas dépasser le maximum de tension de grille du MOSFET. En cas d'utilisation d'une tension Vs plus élevée, il ne faut pas dépasser 50 V si l'on veut rester dans le domaine des très basses tensions, car la tension aux bornes de la charge est alternative.
Pour une fréquence de 10 kHz et R=1000 Ω voici la tension de commande (en bleu) et la tension de grille (en rouge) :
et la tension de commande (en bleu) avec la tension de drain (en rouge) :
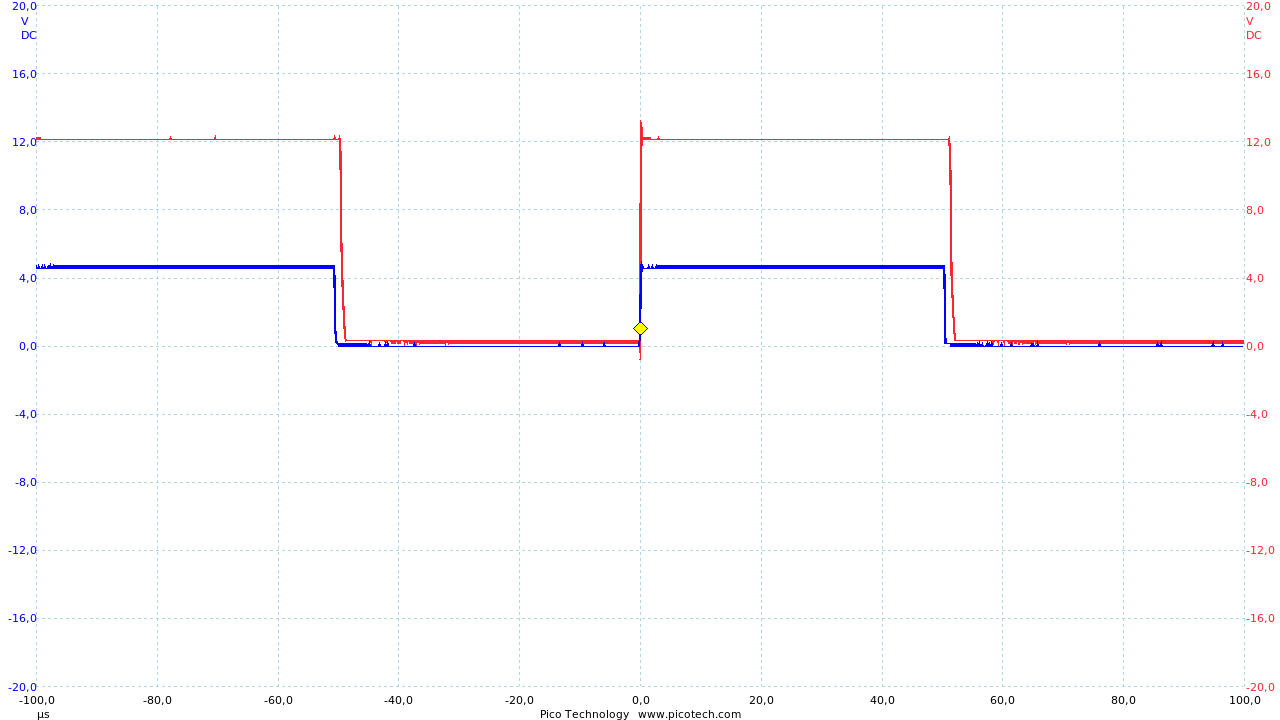
Le transistor NPN opère une inversion : le MOSFET est bloqué lorsque la tension de commande est à l'état haut. Lorsque le transistor NPN passe de l'état saturé à l'état bloqué (front descendant du signal de commande), le temps de montée de la tension de grille est relativement grand, ce qui a pour conséquence un retard dans la conduction du MOSFET. Pour une fréquence de 10 kHz ou moins, ce fonctionnement est très satisfaisant. Pour des charges à forte inertie thermique (résistances chauffantes ou lampes à incandescence) une fréquence de découpage de 1000 Hz est largement suffisante et ce montage convient tout à fait (on peut même augmenter R si la fréquence est très basse).
2.c. Commande à fort courant de grille
La commande de grille peut être améliorée avec deux transistors NPN et PNP montés en push-pull ([3]) :
Figure pleine page{kind=link}
Dans ce cas, le courant de charge de la grille est fourni par les deux transistors en push-pull. Lorsque la tension de commande est au niveau bas (0 V ou moins), le transistor T0 est bloqué et la base de T1 et T2 est à environ 12 V. Le transistor T1 est passant alors que T2 est bloquant : la grille se charge par la résistance R et prend rapidement un potentiel 12 V par rapport à la source. Inversement, lorsque la tension de commande est au niveau haut, la base de T1 et T2 est à la masse : T1 est bloquant alors que T2 est passant et la grille se décharge jusqu'à avoir un potentiel nul par rapport à la source. Ce montage peut fournir un courant dans la résistance de grille R jusqu'à 1 A, ce qui peut être nécessaire pour commuter rapidement un transistor MOSFET de forte puissance.
Voici la tension de commande à 10 kHz (en bleu) et la tension de grille (en rouge) :
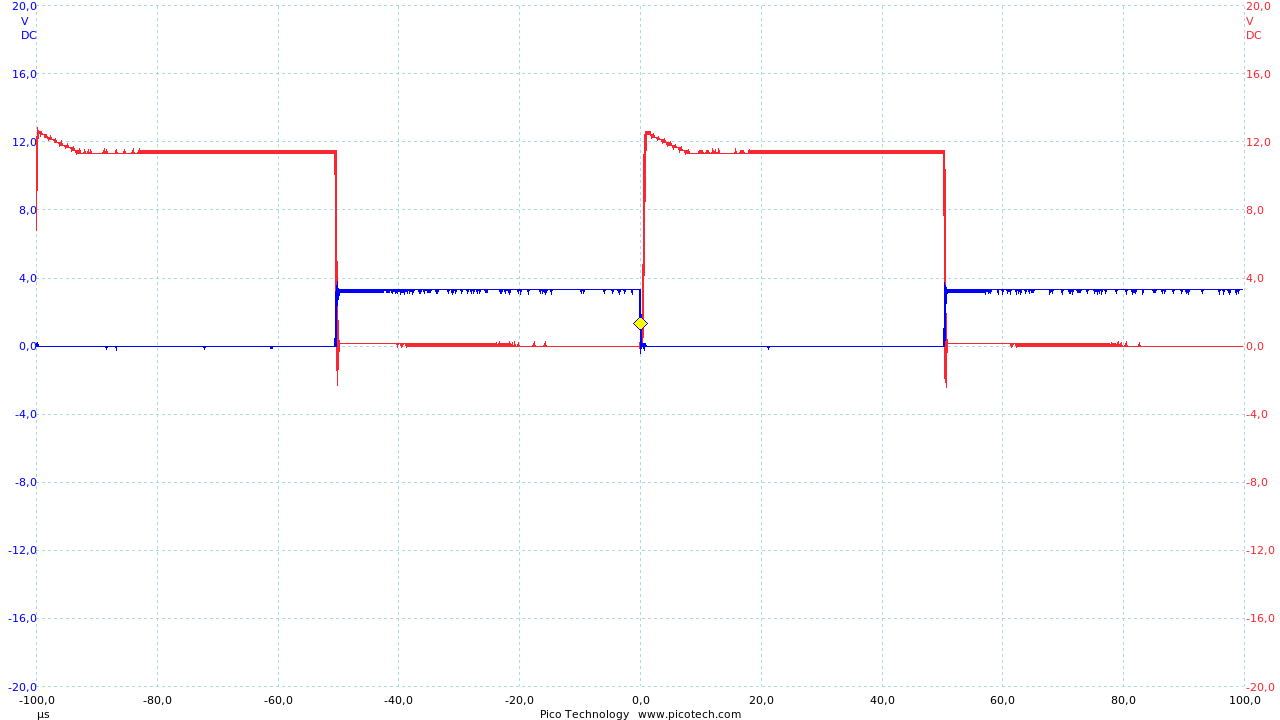
La sortie auxiliaire TTL du GBF est utilisée, dont l'impédance de sortie élevée conduit à une chute de tension sur le signal TTL. La valeur atteinte par la tension de grille est 12 V moins la petite chute de tension émetteur-collecteur du transistor du haut.
Voici la tension de commande et la tension de drain :
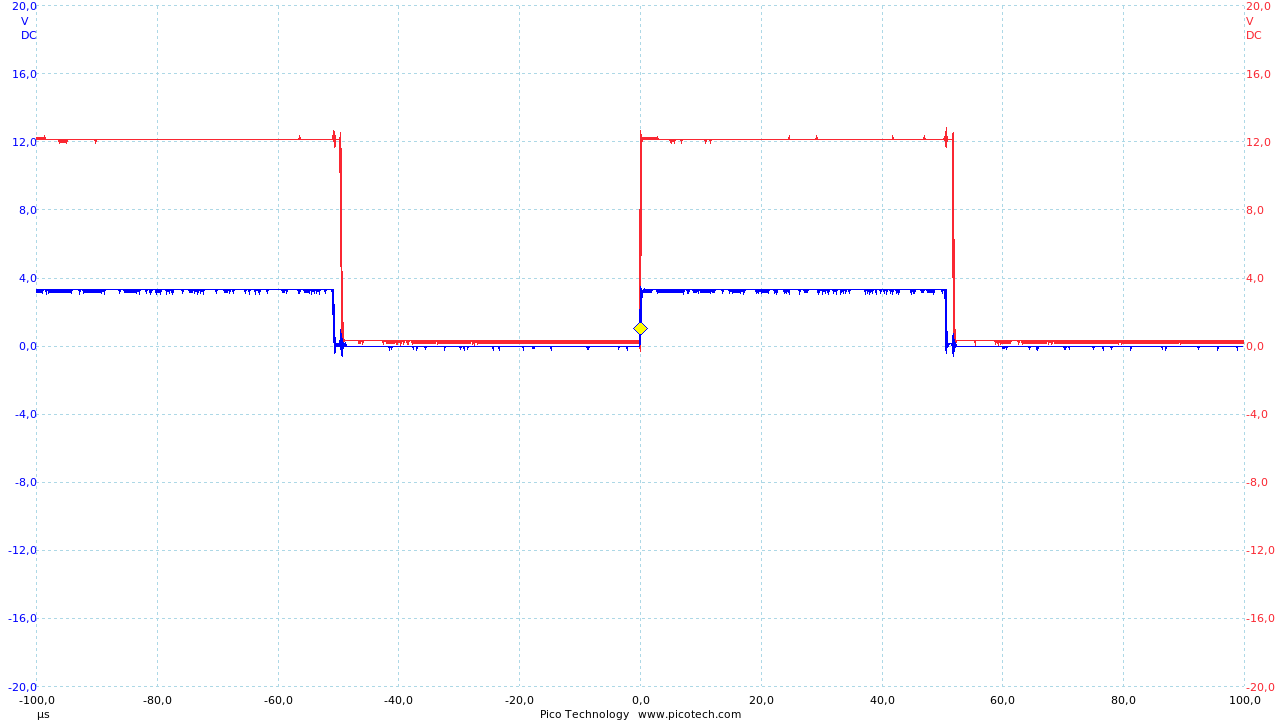
Voici la tension de commande et la tension de collecteur du transistor d'entrée, avec une échelle de temps plus petite :
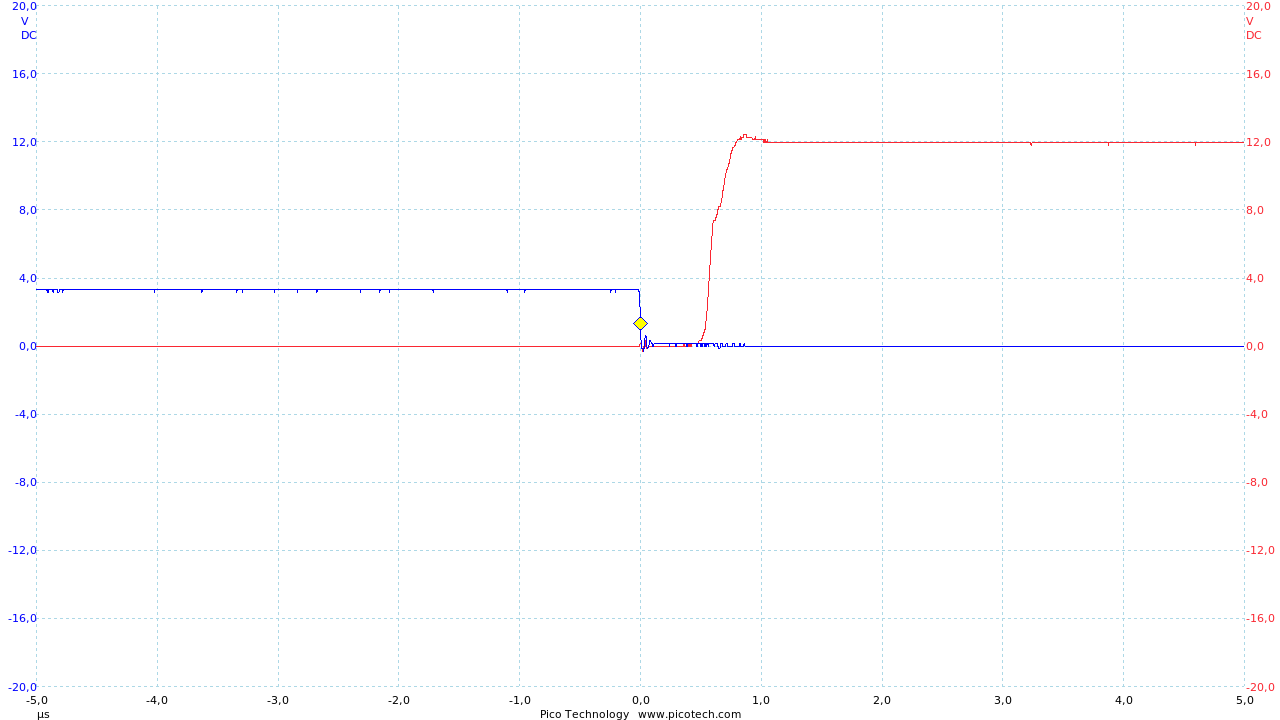
On voit qu'il y a un léger retard de commutation lors du passage de l'état passant à l'état bloqué, de l'ordre de 500 ns. La limite en vitesse de commutation de ce montage provient donc du transistor d'entrée. Le retard est négligeable pour une utilisation à 10 kHz. Pour une utilisation à 100 kHz il est encore acceptable à condition de ne pas utiliser un rapport cyclique trop proche de 0 ou de 1. Voici la tension de commande et la tension Ri (courant vers la grille ) :
Le courant maximal est de 120 mA.
Voici, pour une fréquence de 50 kHz, la tension de commande et la tension de drain :
Le retard de commutation du transistor n'est pas négligeable devant la période. Il est du au temps de stockage du transistor, de l'ordre de 200 ns d'après la notice du 2N2222. Pour réduire ce retard, on ajoute une capacité en parallèle de la résistance de base :
Figure pleine page{kind=link}
Une tension négative est ainsi appliquée à la jonction base-émetteur au lieu d'une tension nulle, ce qui permet de réduire le temps de commutation. Voici le résultat pour une fréquence de 50 kHz, tension de commande (bleu) et tension de drain (rouge) :
Voici le résultat avec un rapport cyclique de 0,9 (qui permet de réduire le courant moyen dans la charge) :

Voici la tension de commande et la tension de la base du transistor d'entrée :
On voit que le condensateur placé en parallèle de la résistance de base n'a pas le temps de se décharger, ce qui assure une tension base-émetteur négative pendant toute la phase de blocage du transistor.
2.d. Commande CMOS
Une autre méthode de polarisation de la grille est l'utilisation de deux transistors MOSFET N et P (structure CMOS). On peut aussi utiliser deux transistors MOSFET-N polarisés en opposition, comme sur le schéma LTSpice ci-dessous :
Figure pleine page{kind=link}
Les deux MOSFETs M1 et M2 de l'étage d'entrée sont pilotés par deux signaux en opposition de phase, d'amplitude 12 V. Ces deux transistors sont beaucoup moins puissants que le transistor U1. Leur grille est donc polarisée assez rapidement avec une résistance de grille élevée (1000 Ω). Pour la simulation, on a placé une charge inductive. La diode placée en parallèle permet au courant de s'écouler lorsque le transistor est bloqué (diode de roue libre).
Voici les commandes SPICE (le modèle du transistor IPA50R500 a été téléchargé sur le site de Infineon) :
Vs N004 0 12
Rc N004 N003 6
R N009 N008 10
V1 N005 0 PULSE(0 12 0 0 0 50u 100u 20)
R2 N007 N006 1000
R1 N010 N005 1000
M1 N008 N010 0 0 2N7002
M2 N001 N007 N008 N008 2N7002
A2 N005 0 0 0 0 N006 0 0 BUF VHigh=12
Vc N001 0 12
Lc N003 N002 1m
XU1 N002 N009 0 IPA50R500CE_L0
D1 N002 N004 D
.model D D
.lib C:\Program Files\LTC\LTspiceIV\lib\cmp\standard.dio
.model NMOS NMOS
.model PMOS PMOS
.lib C:\Program Files\LTC\LTspiceIV\lib\cmp\standard.mos
.tran 0 1000u 0 0.1u
.lib Infineon-MOSFET.lib
.backanno
.end
La commande PULSE génère un signal carré de fréquence 10 kHz.
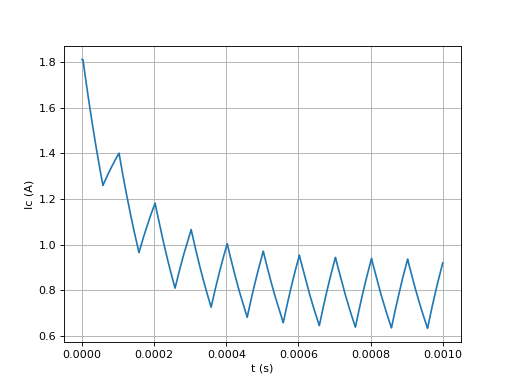
Voici le courant dans la charge :
data = numpy.loadtxt("commandeMOSFET-CMOS.txt2",skiprows=1,unpack=True)
t=data[0]
Ic= data[12]
figure()
plot(t,Ic)
xlabel("t (s)")
ylabel("Ic (A)")
grid()
 figB.pdf
figB.pdf
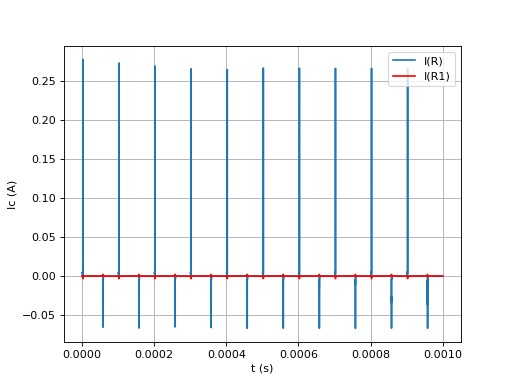
Pendant la conduction du transistor U1, le courant dans la charge augmente. Pendant la phase de blocage, le courant circule dans la diode de roue libre. Voici le courant dans la résistance de grille de U1 et dans la résistance de grille de M1:
t=data[0]
IR= data[13]
IR1 = data[14]
figure()
plot(t,IR,label="I(R)")
plot(t,IR1,'r',label="I(R1)")
xlabel("t (s)")
ylabel("Ic (A)")
legend(loc="upper right")
grid()
 figC.pdf
figC.pdf
On voit que la charge de la grille de U1 nécessite un courant de 250 mA. La charge des grilles de M1 et M2 ne nécessite qu'un faible courant de l'ordre du mA, que l'on peut obtenir avec un circuit logique CMOS.
3. Hacheur deux quadrants
3.a. Commande bootstrap : principe et simulation
Dans le cas d'une charge inductive (moteur, bobine, haut-parleur, etc), il peut être nécessaire de permettre au courant de changer de sens. Il faut pour cela un second transistor de puissance. Voici le schéma de la structure en demi-pont comportant deux transistors MOSFET commandés en opposition, avec le circuit de commande analogue au précédent.
Figure pleine page{kind=link}
Ce montage permet d'appliquer alternativement la tension 0 et la tension Vs à la charge. Les deux transistors Ua et Ub sont commandés en opposition. Lorsque Ua et bloqué, Ub est passant et la tension Vs est appliquée à la charge. Lorsque Ua et passant, Ub est bloqué et la tension nulle est appliquée à la charge. Pendant cette dernière phase, le courant dans la charge peut s'inverser.
Le transistor du bas (Ua) se commande comme précédemment, avec deux transistors en structure CMOS. La commande du transisor du haut (Ub) ne peut se faire de la même manière, car il faut appliquer une différence de potentiel entre sa grille et son drain (au moins 10 V), alors que le drain est déjà à une tension positive (la tension aux bornes de la charge). Pour polariser la grille, on utilise la méthode bootstrap ([2]), qui consiste à utiliser un condensateur. Le principe est le même que celui utilisé dans le montage présenté plus haut, pour polariser en inverse la jonction base-émetteur du transistor bipolaire. Le condensateur Cboot se charge à travers la diode pendant la phase de conduction de Ua (M4 est bloqué). Lorsque M4 bascule à l'état passant et M3 à l'état bloqué, la diode devient bloquante, et on obtient la maille suivante :
Figure pleine page{kind=link}
Le condensateur Cboot doit être entièrement chargé (il se charge très rapidement avec une résistance série très faible). Sa charge est alors égale à environ Vc/Cboot. Cette charge se transfère partiellement à la capacité CGS du transistor Ub.
Voici les commandes SPICE :
Ra N016 N015 10
Va N010 0 PULSE(0 15 0 0 0 50u 100u 10)
R2 N013 N012 1000
R1 N017 N010 1000
M1 N015 N017 0 0 2N7002
M2 N001 N013 N015 N015 2N7002
A1 N010 0 0 0 0 N012 0 0 BUF VHigh=15
Vs N002 0 12
Rb N008 N007 10
R4 N006 N005 1000
R5 N011 N004 1000
M3 N007 N011 N009 N009 2N7002
M4 N003 N006 N007 N007 2N7002
A2 N004 0 0 0 0 N005 0 0 BUF VHigh=15
Rc N009 N014 6
Vc N001 0 15
L1 N014 0 1m
A3 N010 0 0 0 0 N004 0 0 BUF VHigh=15
XUb N002 N008 N009 IPA50R500CE_L0
XUa N009 N016 0 IPA50R500CE_L0
Cboot N003 N009 100n
D1 N001 N003 D
.model D D
.lib C:\Program Files\LTC\LTspiceIV\lib\cmp\standard.dio
.model NMOS NMOS
.model PMOS PMOS
.lib C:\Program Files\LTC\LTspiceIV\lib\cmp\standard.mos
.tran 0 1000u 0 0.1u
.lib Infineon-MOSFET.lib
.backanno
.end
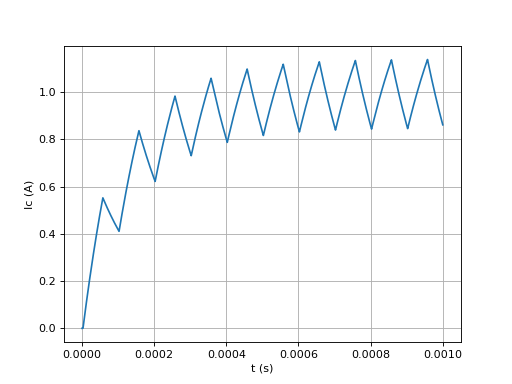
Voici le courant dans la charge :
data = numpy.loadtxt("commandeMOSFET-bootstrap.txt2",skiprows=1,unpack=True)
t=data[0]
Ic= data[27]
figure()
plot(t,Ic)
xlabel("t (s)")
ylabel("Ic (A)")
grid()
 figD.pdf
figD.pdf
Voici les tensions de grille et de source du transistor du haut (la seconde est aussi la tension appliquée à la charge) :
Ug = data[8]
Us = data[9]
figure()
plot(t,Ug,label="grille")
plot(t,Us,label="source")
xlabel("t (s)")
ylabel("U (V)")
legend()
grid()
#axis([0,0.001,0,15])
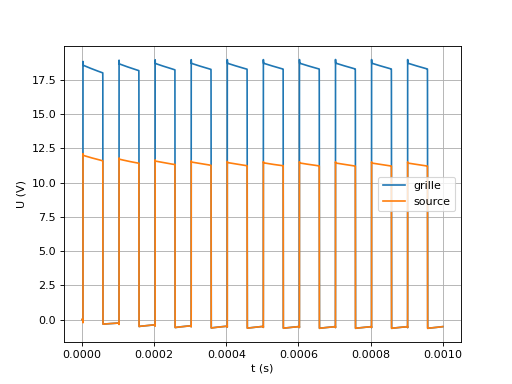 figE.pdf
figE.pdf
On voit que le condensateur Cboot permet d'élever la tension de grille suffisamment pour polariser la grille par rapport à la source et rendre le transistor passant.
3.b. Réalisation
Le circuit ci-dessus est trop complexe pour être réalisé avec des composants discrets. On utilise plutôt un contrôleur de MOSFET pour demi-pont. Il existe de nombreux modèles (par exemple chez International Rectifier), que l'on choisit en fonction du courant maximal que la grille nécessite pour être chargée. Plus les MOSFET de puissance peuvent véhiculer un courant important, plus leur capacité de grille est élevée, et plus le courant de grille est important (il faut abaisser la résistance de grille).
Nous utilisons le contrôleur IR2113, dont voici le schéma interne :
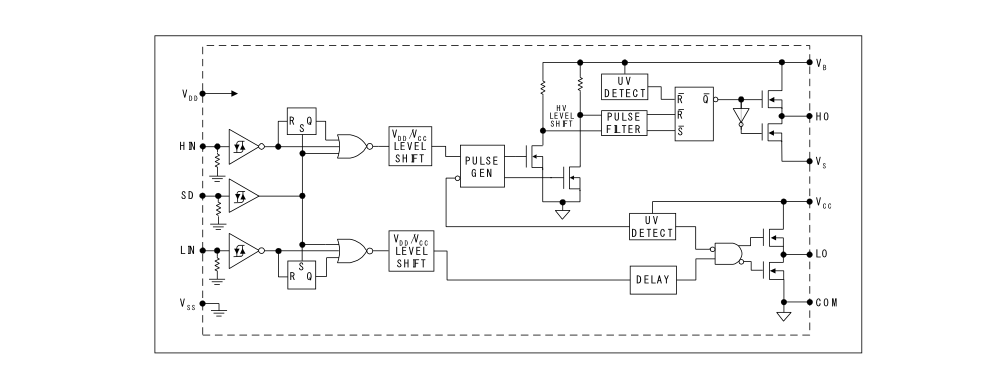
Le contrôleur comporte une partie basse (LOW) et une partie haute (HIGH). Les entrées LIN et HIN doivent recevoir deux signaux de commande complémentaires. Un contrôleur de ce type comporte un système de décalage (DELAY) entre les deux commandes, qui permet d'éviter la conduction simultanée des deux transistors, qui constituerait un court-circuit de l'alimentation. Le contrôleur IR2113 peut fournir un courant de 2 A sur les sorties LO et HO vers les grilles des transistors, ce qui est très largement suffisant pour les transistors utilisés ici. Ce contrôleur peut être utilisé avec des MOSFET ou des IGBT de très forte puissance, à des fréquences très élevées.
Voici le circuit complet avec les deux transistors MOSFET de puissance :
Figure pleine page{kind=link}
La porte inverseuse 74LS04 permet de générer le signal complémentaire du signal de commande. On remarque la présence de trois alimentations. L'alimentation Vdd correspond au niveau logique du signal de commande. En pratique, on pourra utiliser l'alimentation d'une carte Arduino. L'alimentation Vc sert à polariser les grilles et doit pouvoir fournir le courant nécessaire. Elle doit donc être comprise entre 12 et 20 V. Enfin l'alimentation de puissance Vs sert à alimenter la charge au travers des résistances drain-source des deux transistors MOSFET. Si Vs est inférieure à 20 V, on peut utiliser la même alimentation pour Vc et Vs, mais il faut alors que Vs soit au moins égal à 12 V pour polariser correctement les grilles. La limite de 50 V pour Vs correspond à la limite supérieure du domaine des très basses tensions en alternatif. En effet, si l'on utilise ce montage pour faire un onduleur basse fréquence (50 Hz), la tension aux bornes de la charge présente un danger d'électrisation au delà de 50 V. On peut néanmoins utiliser ces transistors avec une alimentation jusqu'à 500 V, à condition bien-sûr que la charge soit prévue pour cela.
La capacité Cboot doit être choisie assez grande pour permettre la charge de la grille. La charge de grille du transistor IPA50R500CE est, d'après la notice, de 19 nC. Avec une tension de 15 V, une capacité Cboot=100 nF permet de stocker 1,5 μC, ce qui est très largement suffisant pour charger la grille avec une tension proche de 15 V.
La charge utilisée pour le test est une résistance R en série avec une bobine d'inductance L. La tension aux bornes de la résistance permet d'accéder au courant dans la charge.
3.c. Tests
La résistance de la charge R=6,8 Ω est une résistance bobinée de puissance maximale 25 W. L'inductance est réalisée par une bobine à air.
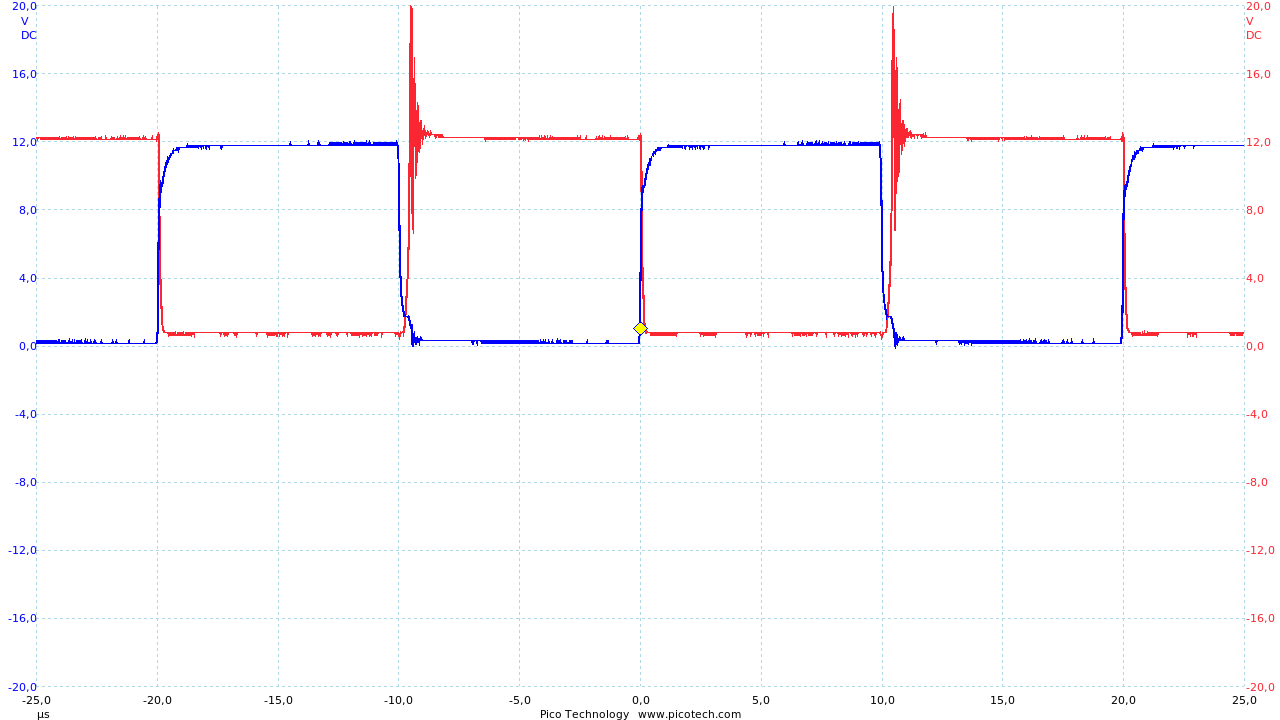
Voici la tension de commande (en bleu) et la tension aux bornes de la charge (en rouge) pour une fréquence de 2 kHz et une tension alimentation Vs=12 V :
Voici la tension de commande (en bleu) et la tension aux bornes de la résistance R :
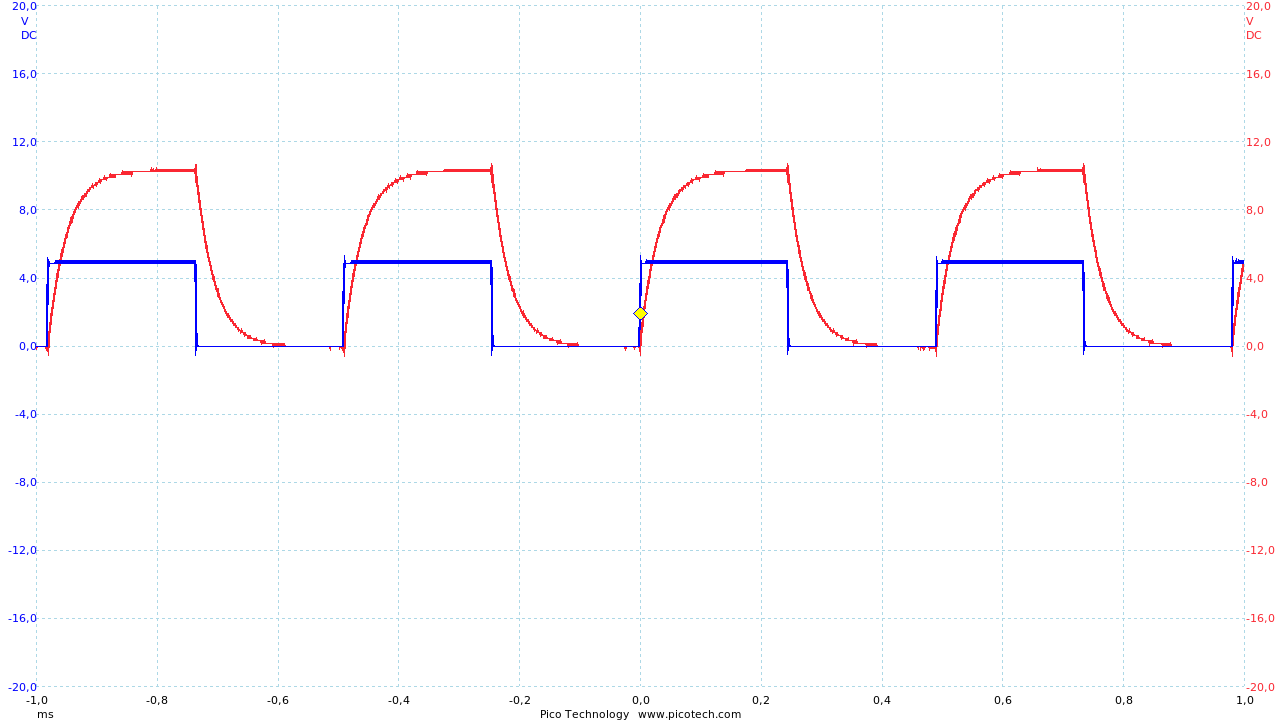
Le temps de réponse du circuit RL est de 0,1 ms, ce qui permet d'estimer la valeur de l'inductance à L=700 μH
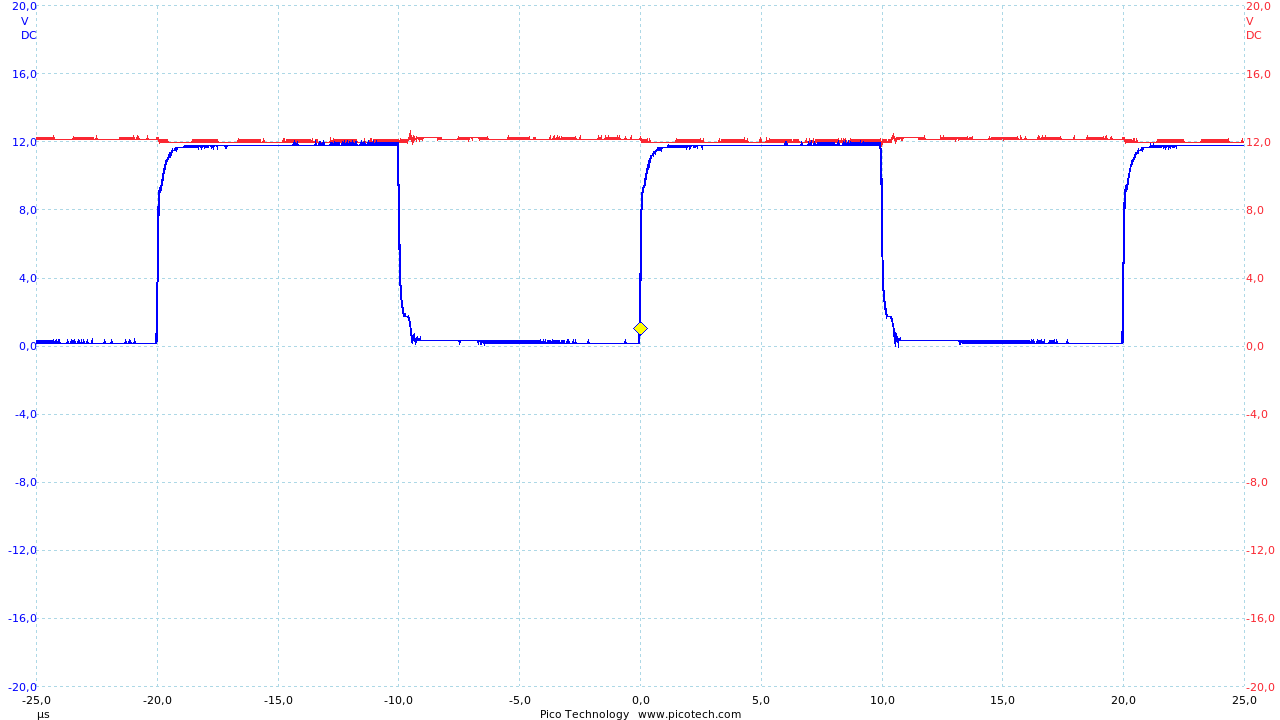
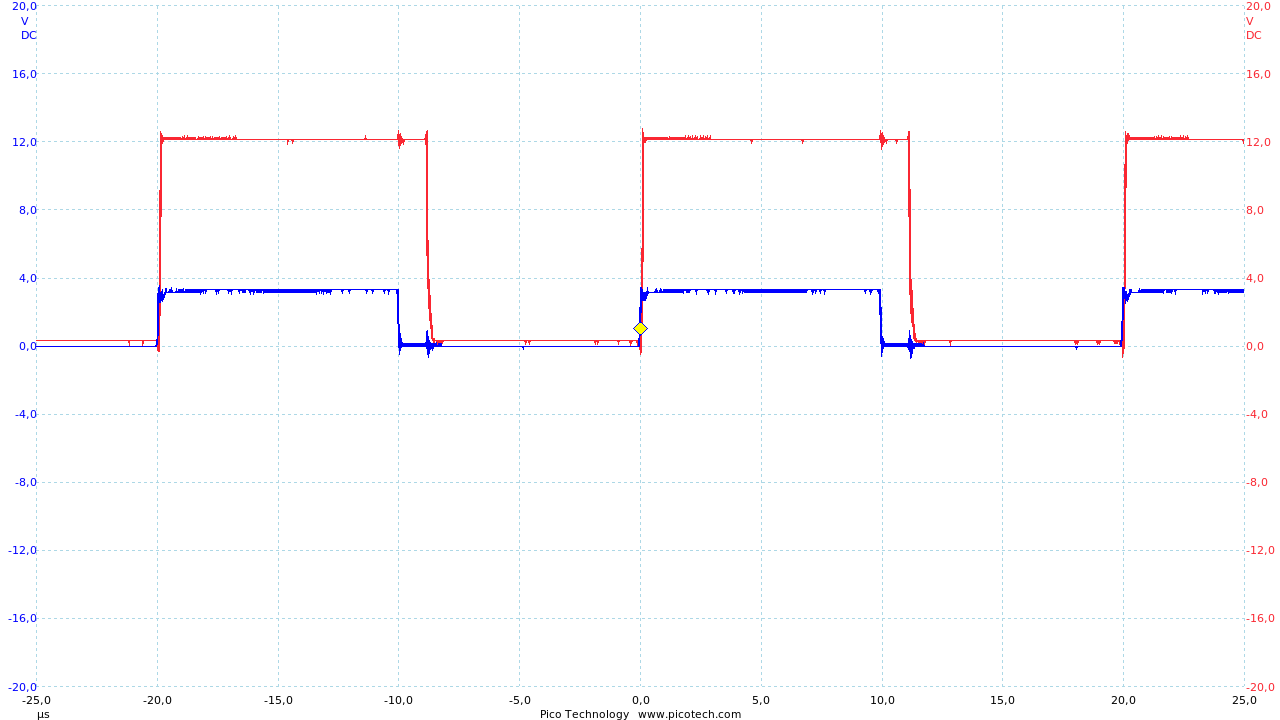
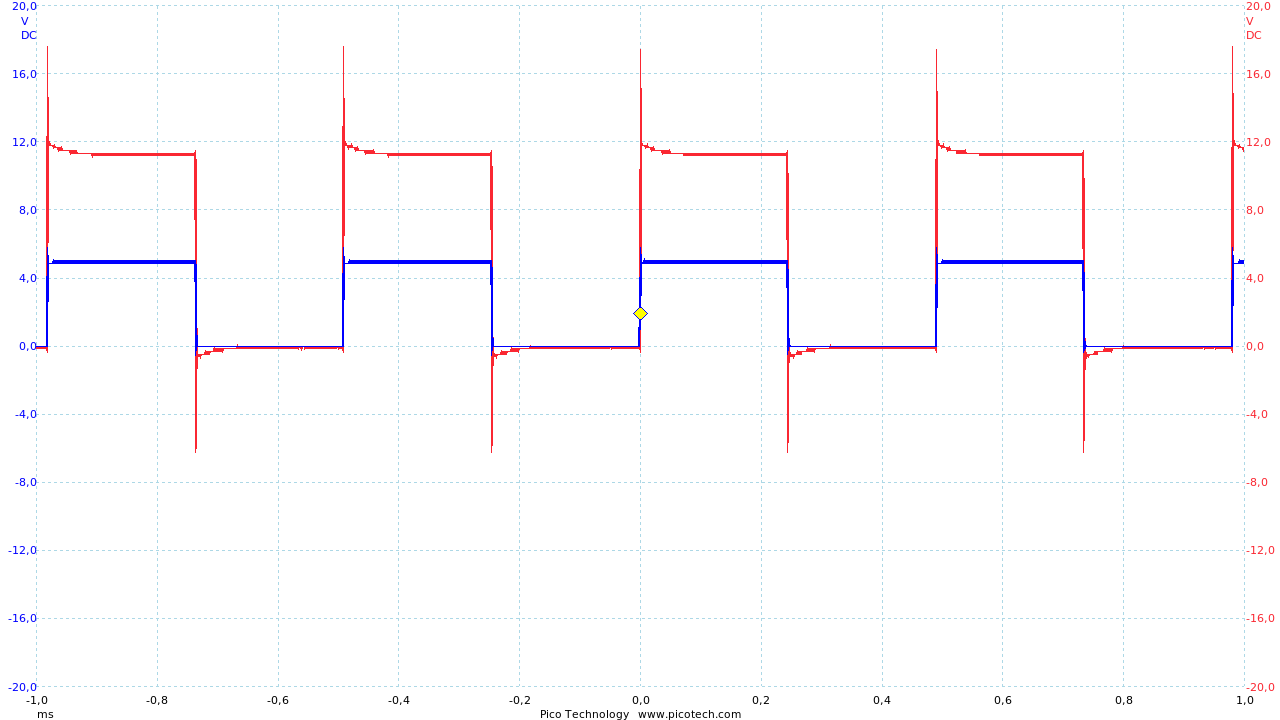
Voici les tensions pour une fréquence de 10 kHz :
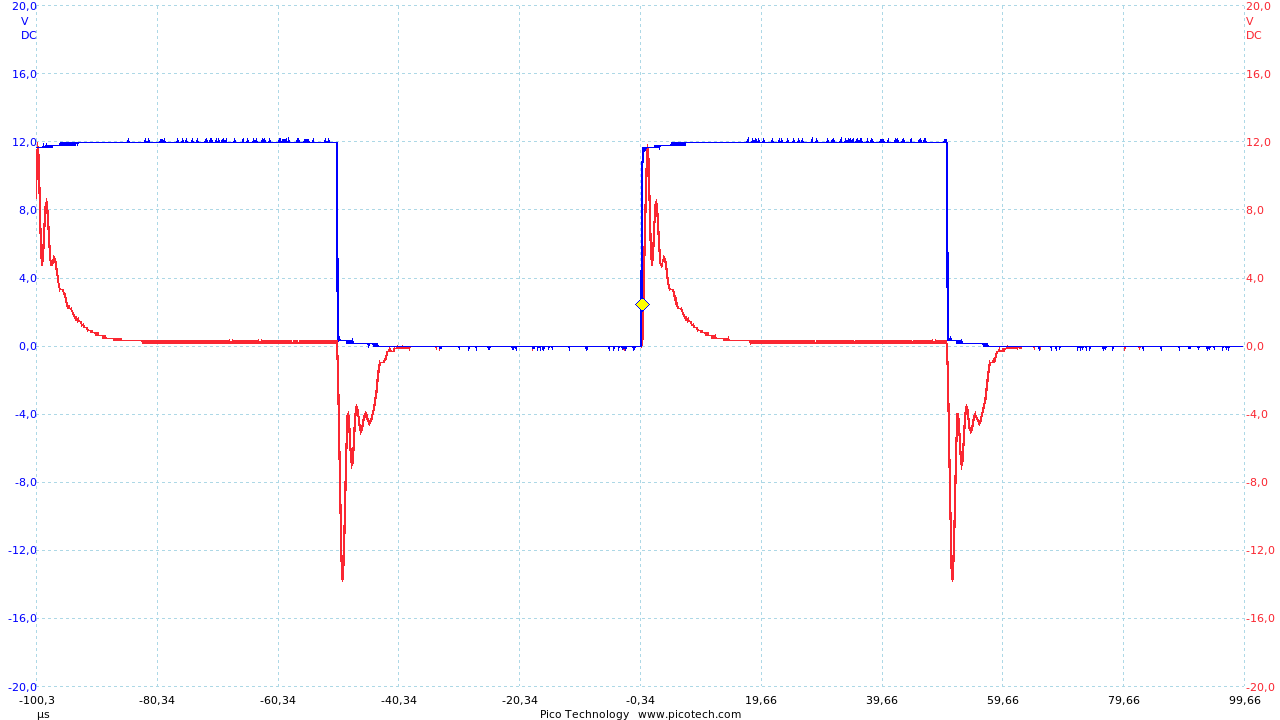
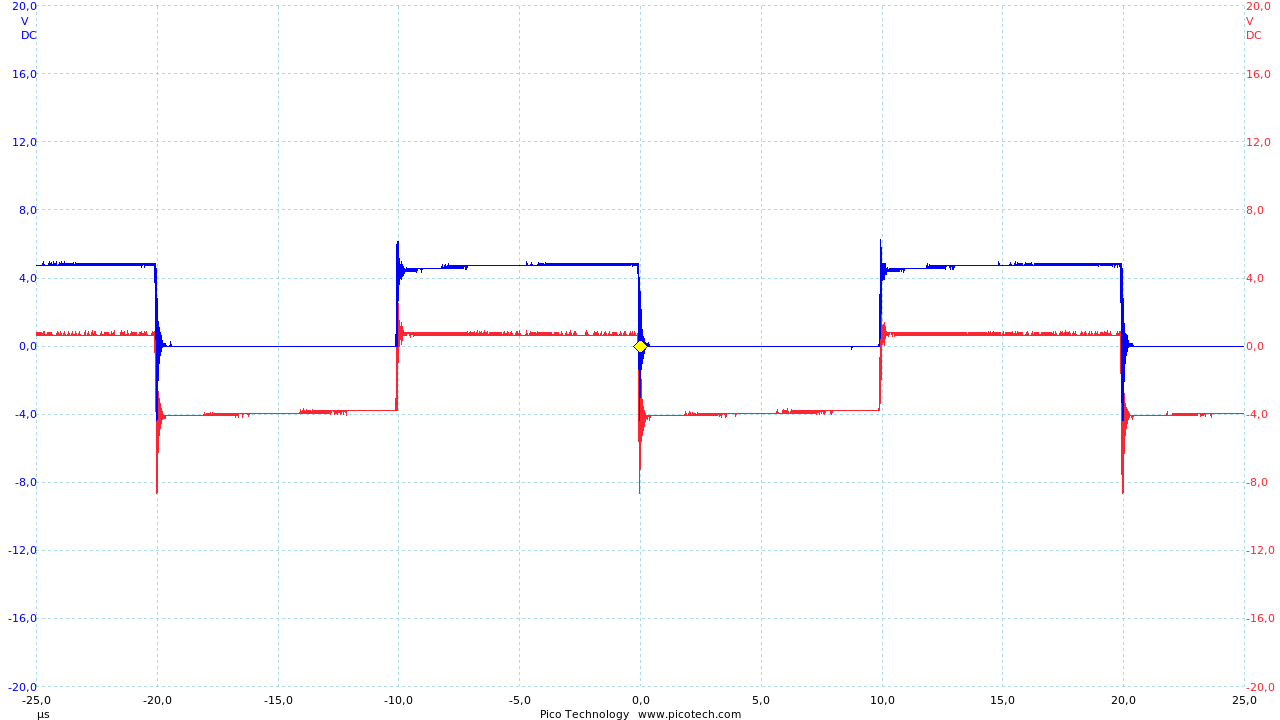
Dans l'objectif de générer un courant par modulation de largeur d'impulsion (MLI), il faut augmenter la fréquence de découpage de manière à réduire l'ondulation du courant. Voici le résultat à une fréquence de 100 kHz :
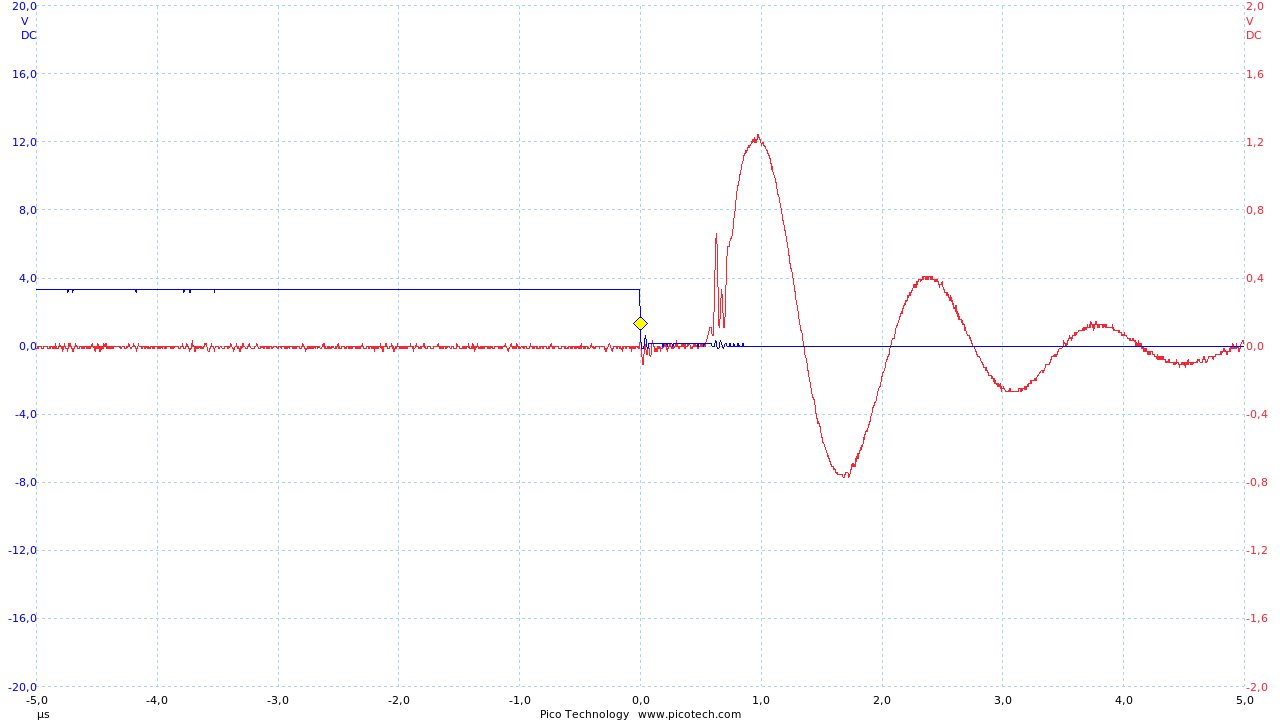
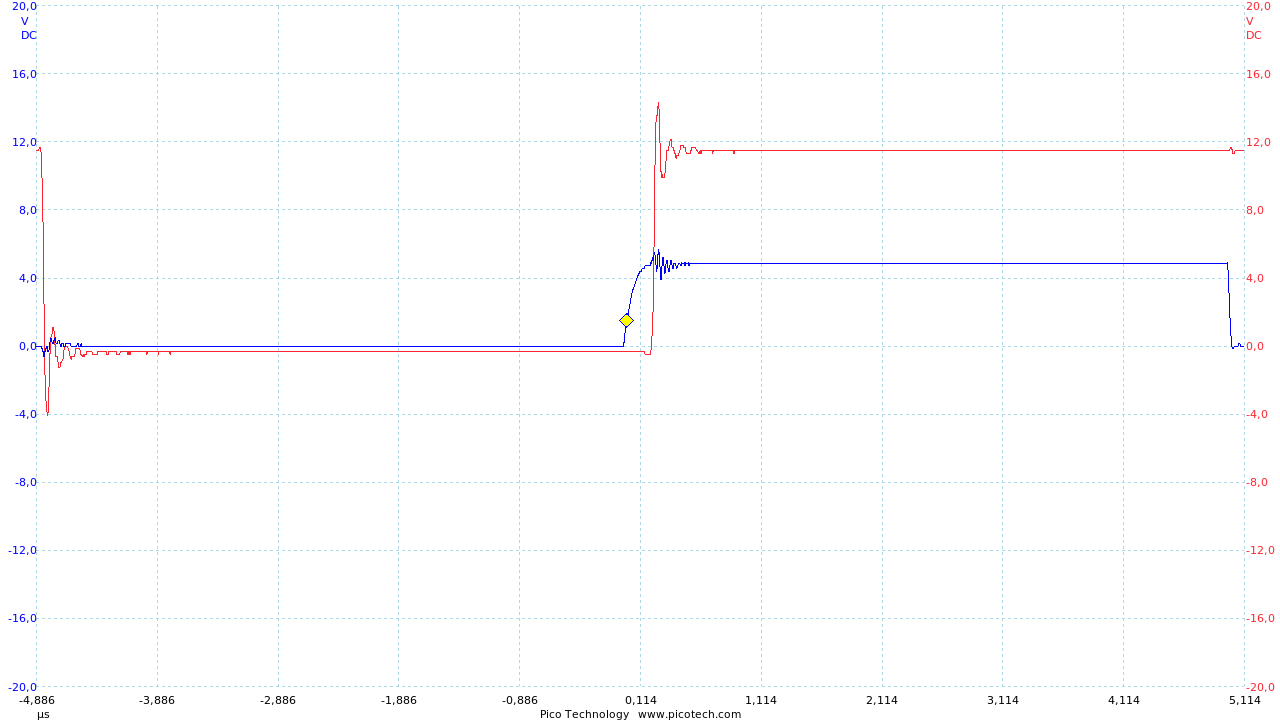
L'ondulation du courant est beaucoup plus faible. On voit un léger décalage entre la tension de commande et la commutation des transistors. Il y a des oscillations de la tension juste après la commutation. Ces oscillations, déjà observées plus haut avec une seul transistor, sont dues au couplage entre la capacité drain-source et les inductances des liaisons. Voici un détail :
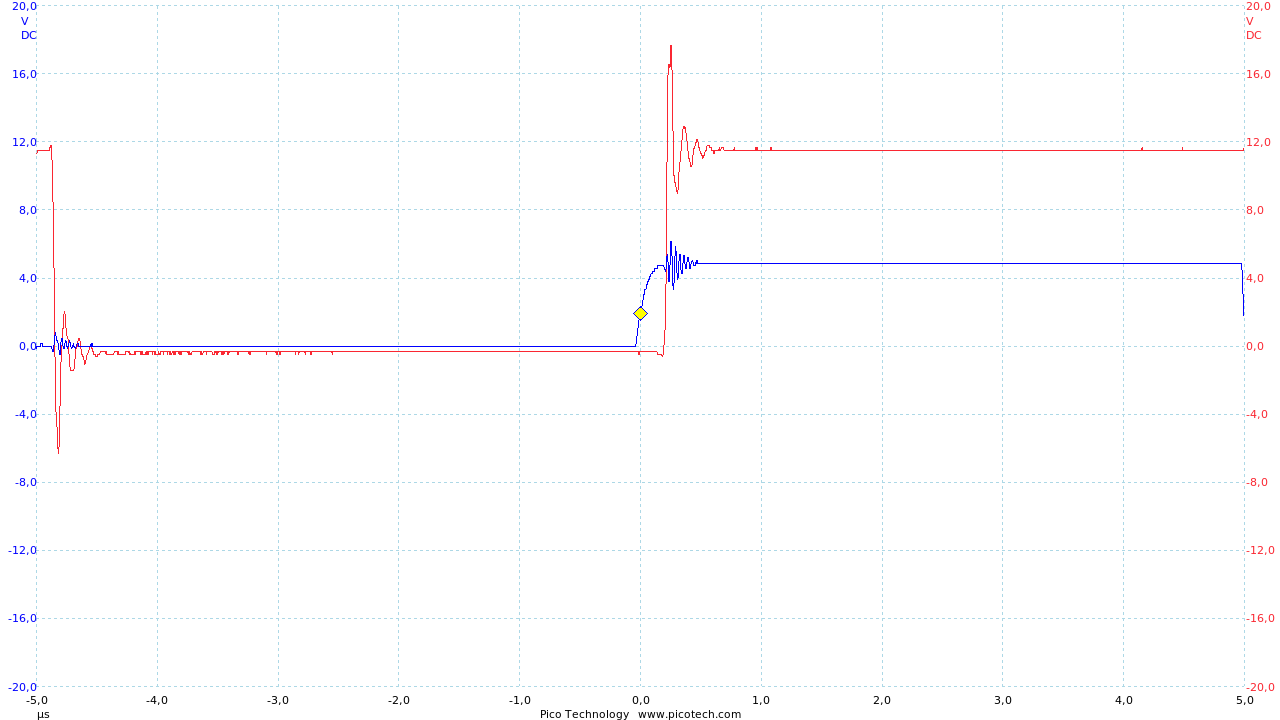
Ces oscillations ont l'inconvénient de donner une surtension qui peut être très grande si la commutation est très rapide. Dans le cas présent, la tension atteint 18 V. Il y a aussi une propagation de ces oscillations d'un point à l'autre du circuit, éventuellement par voie hertzienne (perturbations électromagnétiques). On voit ici leur effet sur la tension de commande, mais les perturbations sont visibles aussi sur les tensions d'alimentation. Leur fréquence est ici d'environ 8 MHz.
3.d. Réduction des oscillations de commutation
Les réglages décrits dans ce paragraphe doivent être faits sur le circuit imprimé final de l'application, car les inductances et capacités parasites dépendent du tracé des pistes.
Les oscillations, qui se produisent juste après la commutation des transistors, sont dues aux capacités et inductances parasites présents dans la maille de puissance contenant la charge. La pseudopériode des oscillations est de 120 ns. Pour estimer la capacité parasite, on ajoute une capacité Ca entre la sortie (connectée à la charge) et la masse, de manière à obtenir une période deux fois plus grande. La valeur nécessaire est Ca=14 μF. Sachant que la fréquence propre d'un circuit LC est inversement proportionnelle à la racine carrée de C, la capacité a été multipliée par 4, ce qui signifie que la capacité parasite est un tiers de la capacité ajouté, soit Cp=4,7 nF.
La fréquence des oscillations étant f0=8,3 MHz, une estimation de l'inductance parasite est donnée par :
Pour réduire l'amplitude des oscillations, on ajoute en sortie un réseau RC d'amortissement ([4]) :
Figure pleine page{kind=link}
En principe, la résistance optimale pour le réseau d'amortissement est :
La valeur la plus proche que nous avons à disposition est Rs=5,2 Ω. La capacité minimale est :
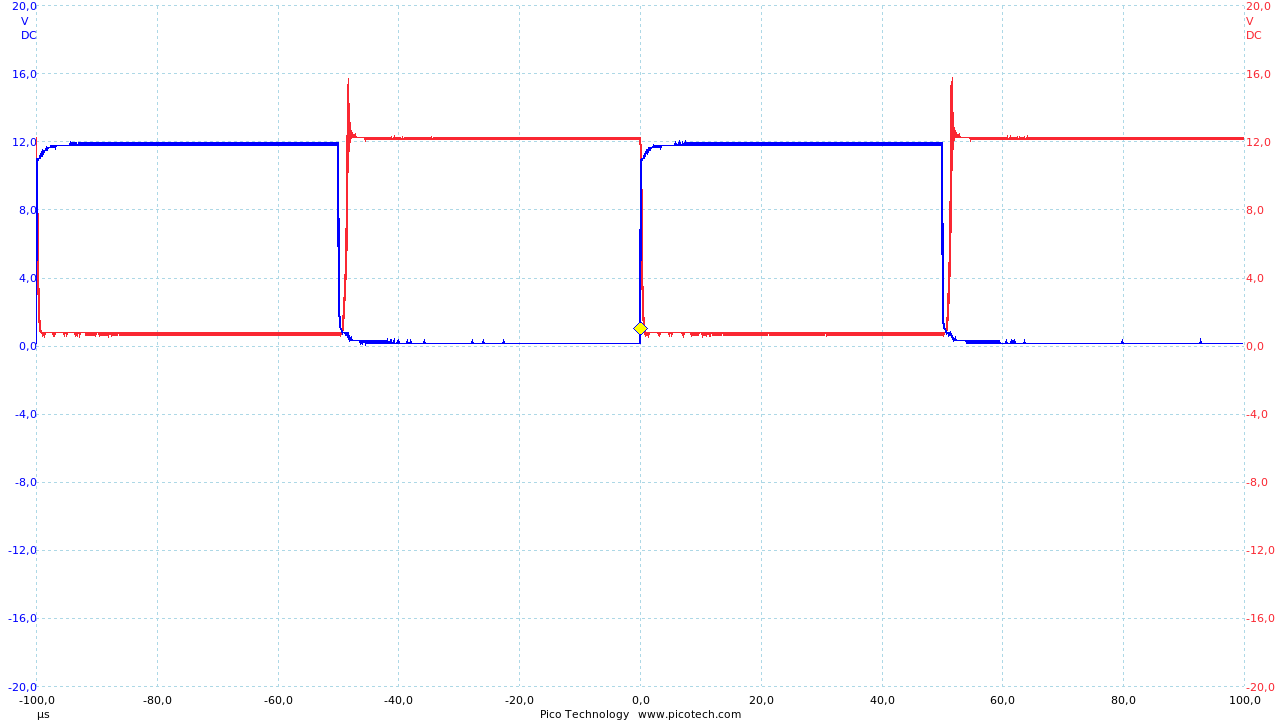
En pratique, il faut augmenter cette valeur pour obtenir un effet visible. Cependant, la puissance dissipée dans Rs est proportionnelle à Cs. Voici un premier test avec Cs=15 nF :
Les oscillations sont toujours présentes, mais la surtension est passée de 18 V à 14 V.
3.e. Application : onduleur pour bobine
Un onduleur à modulation de largeur d'impulsion (MLI) est réalisé avec un signal de commande délivré par un microcontrôleur. Pour le principe de la MLI avec un Arduino, voir Génération d'un signal par modulation de largeur d'impulsion. On utilise le programme Arduino présenté dans Onduleur monophasé MLI, qui délivre le signal de commande sur la sortie 11.
On utilise une bobine à air contenant 500 spires et d'inductance L=11 mH.
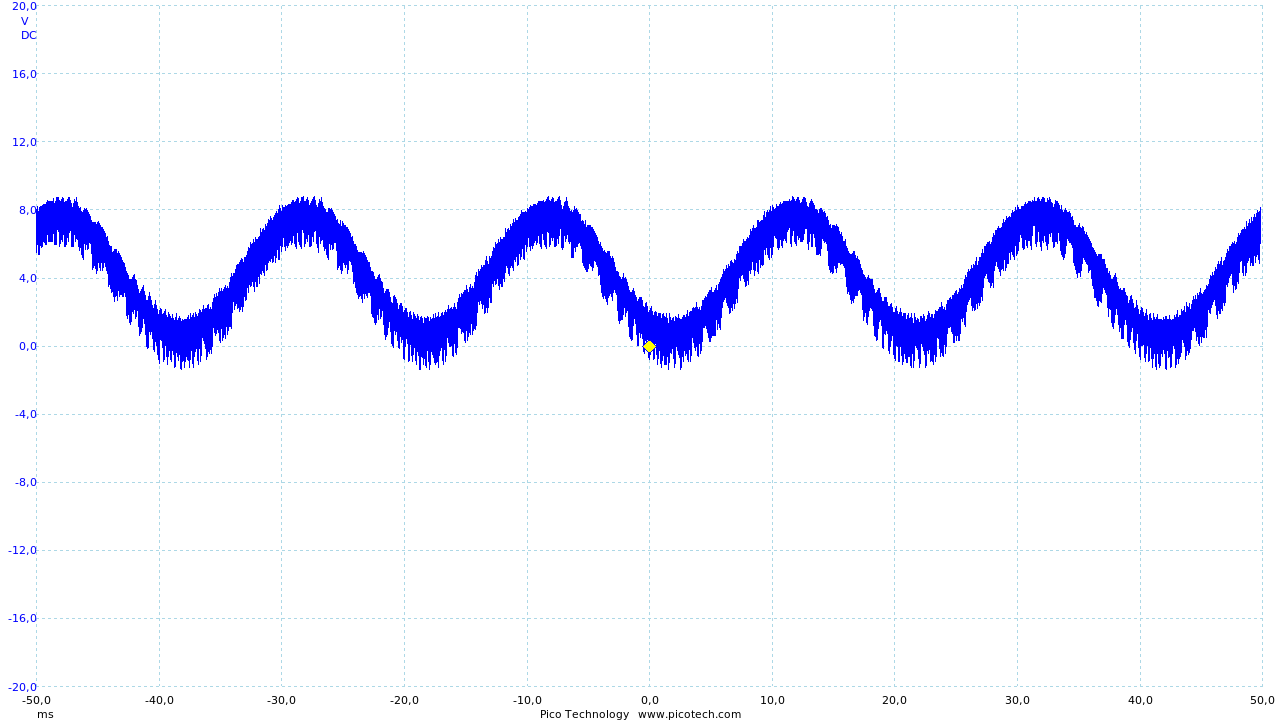
Voici la tension aux bornes de la résistance, pour une porteuse de fréquence 50 kHz, et une sinusoïde générée à 50 Hz avec une amplitude de 0,9 (on évite les rapports cycliques trop proches de 0 et de 1).
et voici un détail :
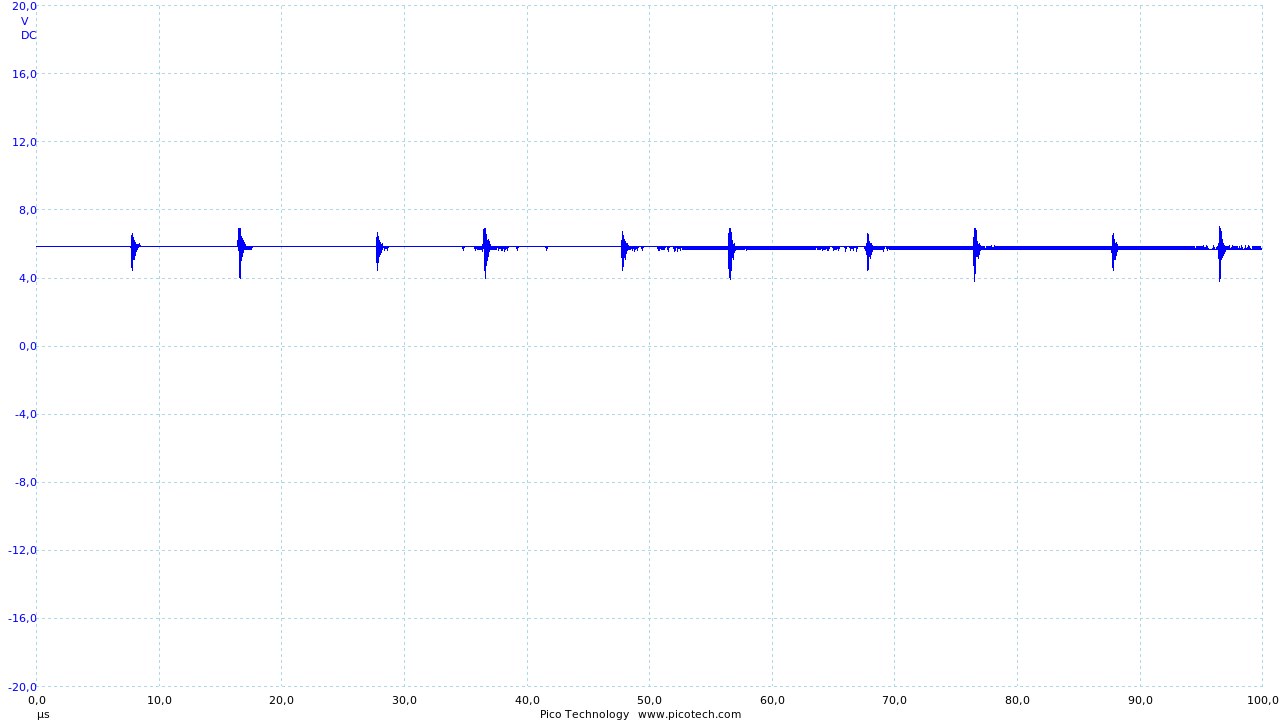
Le bruit visible sur la première figure, à grande échelle de temps, correspond aux oscillations du courant à la commutation des transistors. Même si l'effet sur le signal est spectaculaire, ces pics ne sont pas gênants pour une application électromécanique. On voit par ailleurs que la modulation MLI donne un signal avec un décalage DC. Pour obtenir un signal sans composante DC, il y a trois méthodes :
- Placer en série avec la charge un condensateur de couplage AC (condensateur électrochimique de très forte capacité).
- Utiliser deux alimentations de puissance.
- Utiliser un pont en H avec deux hacheurs identiques.
La première solution a l'avantage de la simplicité, mais ne permet pas d'accéder à des très basses fréquences. Voici le résultat avec un condensateur électrochimique de 2200 μF :
La valeur efficace du courant est 2.6/6.8=380 mA. Pour l'augmenter, il faut réduire la résistance R ou augmenter la tension Vs de l'alimentation.
Avec Vs=24 V et R=1 Ω, on obtient un courant efficace de 1,6 A.
3.f. Autre exemple
Certains circuits de commande ont une seule entrée, ce qui évite l'emploi d'une porte inverseuse. Voici un autre exemple de hacheur avec un IR2184 et deux transistors IRF530, qui peuvent supporter jusqu'à 14 A en continu.
Figure pleine page{kind=link}
Le circuit de commande applique un temps mort de 500 ns entre les commandes des deux grilles, de manière à éviter la conduction simultanée des deux transistors.
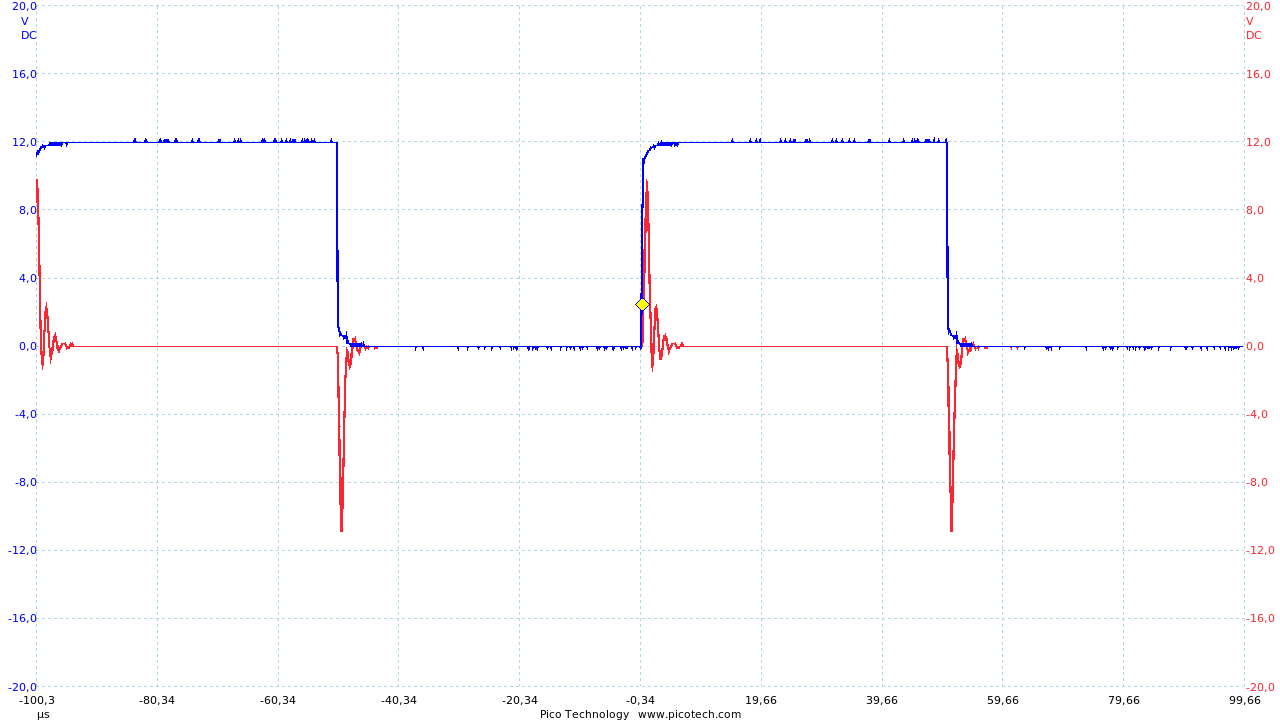
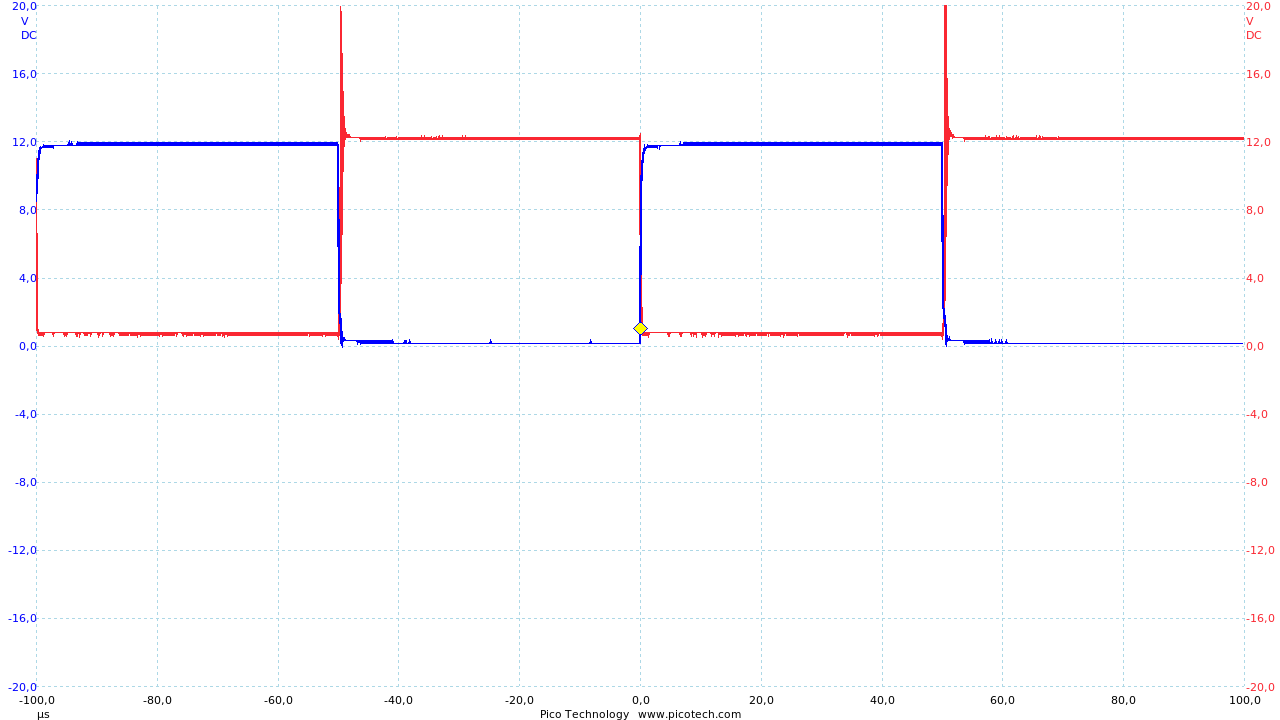
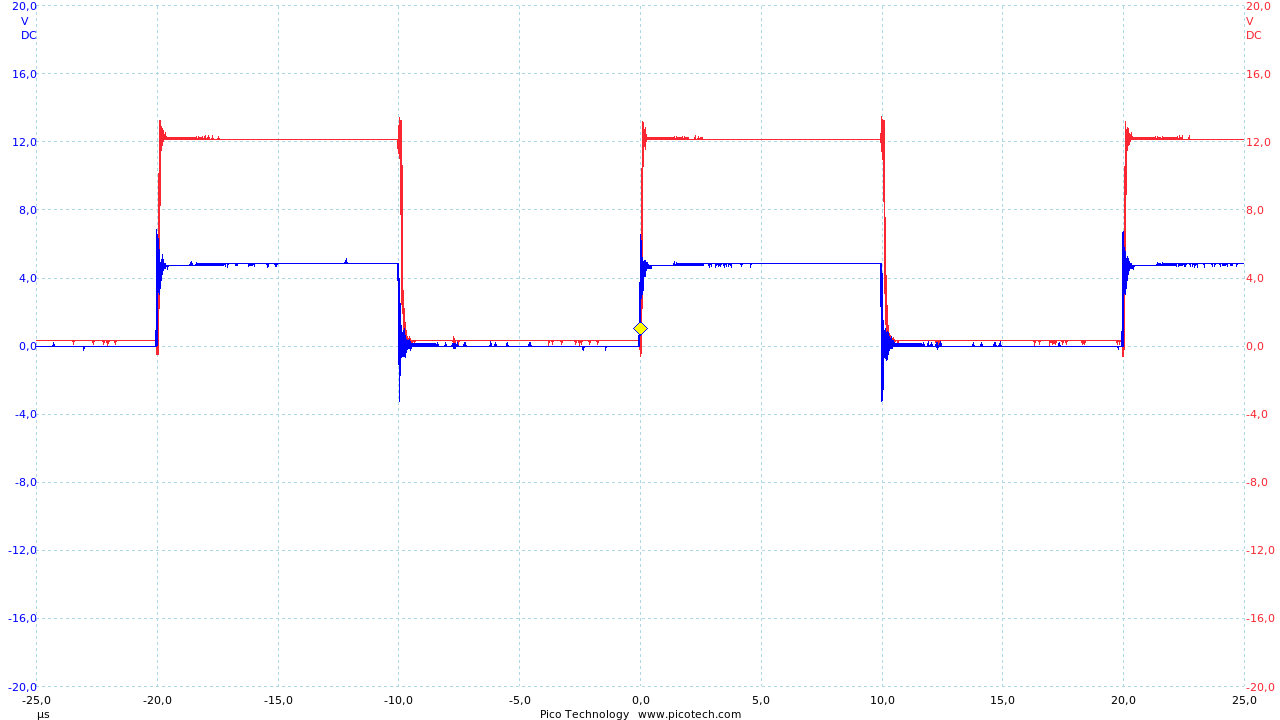
Voici un essai avec une résistance R=6,8 Ω comme charge, un alimentation Vs=12 V et une fréquence de découpage de 100 kHz. La tension de commande et en bleu, la tension aux bornes de la charge en rouge.
Comparé au circuit de commande précédent (IR2113), celui-ci introduit un délai plus grand entre le basculement de la tension de commande et celui des transistors (environ 600 ns pour la mise en conduction du transitor du haut). C'est l'inconvénient d'un temps mort fixe aussi grand. Pour ce circuit, une fréquence de découpage de 100 kHz est trop grande car le rapport cyclique de l'entrée ne se retrouve pas à l'identique en sortie.
Là encore, les oscillations qui se présentent en sortie juste après la commutation peuvent être réduites avec un circuit RC d'amortissement.